�l(f��)���r(sh��)�g�����ٷ���r(n��ng)�I(y��)Փ���g�[��1��
ժ Ҫ�� ժҪ���Ƅ�(d��ng)�o(w��)���������W(w��ng)�j(lu��)���g(sh��)���r(n��ng)����Ϣ�O(ji��n)�y(c��)�ṩ�˸�Ч���еļ��g(sh��)�ֶΡ�ԓ�о�����(j��)�Ϸ��r(n��ng)��؉K����(du��)��ɢ������ɽ�ض࣬�r(n��ng)����Ϣ�@ȡ�h(hu��n)�����ӡ��ɼ���(sh��)��(j��)�r(sh��)�g�����L(zh��ng)���W(w��ng)�j(lu��)�ָ�ɉK�����c(di��n)������UAV(unmanned aerialvehicle)���еĸ�Ч���`������ԣ��Y(ji��)�ϵ��ğo(w��)��������
����ժҪ���Ƅ�(d��ng)�o(w��)���������W(w��ng)�j(lu��)���g(sh��)���r(n��ng)����Ϣ�O(ji��n)�y(c��)�ṩ�˸�Ч���еļ��g(sh��)�ֶΡ�ԓ�о�����(j��)�Ϸ��r(n��ng)��؉K����(du��)��ɢ������ɽ�ض࣬�r(n��ng)����Ϣ�@ȡ�h(hu��n)�����ӡ��ɼ���(sh��)��(j��)�r(sh��)�g�����L(zh��ng)���W(w��ng)�j(lu��)�ָ�ɉK�����c(di��n)������UAV(unmanned aerialvehicle)���еĸ�Ч���`������ԣ��Y(ji��)�ϵ��ğo(w��)���������W(w��ng)�j(lu��)�����һ�N�M���Ϸ��r(n��ng)����Ϣ�@ȡ�ɘӺ͔�(sh��)��(j��)�I(y��)��(w��)��������Ӽܘ�(g��u)�ğo(w��)���������W(w��ng)�j(lu��)�wϵ�Y(ji��)��(g��u)TUFSN(three.tire unmanned aerial vehicle farmland sensor network)�����ɔ�(sh��)��(j��)�ɼ��ӡ����^��ݔ�Ӻ��Ƅ�(d��ng)�R�یӽM�ɣ�ԓ�wϵ�Y(ji��)��(g��u)����ϵ�y(t��ng)�Y(ji��)��(g��u)�������ɔU(ku��)չ�Ժá�ϵ�y(t��ng)���w�ܺĵ͵����c(di��n)��ͨ�^(gu��)����ɵ����^��(ji��)�c(di��n)RN (relay node)�ľ����С������3��13kB��ϵ�y(t��ng)ԇ�(y��n)�Дy���Ƅ�(d��ng)��(ji��)�c(di��n)��UAV��lm/s���ٶȡ�15 m�ĸ߶����r(n��ng)���Ͽ��w�^(gu��)���w���^(gu��)�����c�������^��(ji��)�c(di��n)ͨ�Ų��ɼ��r(n��ng)����Ϣ��UAV�c�������^��(ji��)�c(di��n)��ƽ��ͨ�ŕr(sh��)�L(zh��ng)��26 S�������ԇ�(y��n)����������UAV�����Ӽܘ�(g��u)�r(n��ng)����Ϣ�ɼ��o(w��)���������W(w��ng)�j(lu��)�ܺõ؝M�����Ϸ��^(q��)�r(n��ng)����Ϣ��(sh��)��(j��)�ɼ��ͱO(ji��n)�ص����������L(zh��ng)����ݔ��(sh��)��(j��)�ɿ������w��e�V��Ҫ��
�����P(gu��n)�I�~���o(w��)�˙C(j��);�o(w��)���������W(w��ng)�j(lu��);�O(ji��n)�y(c��);�r(n��ng)��
����0����
�����o(w��)���������W(w��ng)�j(lu��)(WSN��wireless sensor network)��Ƕ��ʽ���g(sh��)���W(w��ng)�j(lu��)���g(sh��)�͂��������g(sh��)��Y(ji��)�ϵĮa(ch��n)���܊�¡����I(y��)���r(n��ng)�I(y��)�ȶ���(g��)�I(l��ng)��(y��ng)�ã��M(j��n)����Ϣ�@ȡ�͌�(du��)���ۙ����Ŀǰ��(gu��)��(n��i)���о��ğ��c(di��n)��l’2�����r(n��ng)����Ϣ�O(ji��n)�y(c��)�o(w��)���������W(w��ng)һ�㲿���ڗl������(du��)���ӵĴ���Ȼ�r(n��ng)�I(y��)�h(hu��n)���У��Á�(l��i)��(du��)�r(n��ng)����r(n��ng)�������Ϣ�M(j��n)�бO(ji��n)�y(c��)��3ئ�����r(n��ng)����Ϣ�O(ji��n)�y(c��)WSN�У������S�C(j��)ɢ������(sh��)������ġ����ĵĹ�(ji��)�c(di��n)����(ji��)�c(di��n)����һ�N��Ƕ��ʽϵ�y(t��ng)�����ԏ��r(n��ng)��h(hu��n)���и�֪���ɼ���Ϣ���r(n��ng)����Ϣ�O(ji��n)�y(c��)WSN���w��Ҫ�����ԽM�ɾW(w��ng)�͔�(sh��)��(j��)��ݔ��ÿ��(g��)��(ji��)�c(di��n)��Ҫ�����M(j��n)�б�����Ϣ�͔�(sh��)��(j��)�IJɼ���̎���Ͱl(f��)�ͣ�߀Ҫ���܌�(du��)������(ji��)�c(di��n)�D(zhu��n)�l(f��)��(l��i)�Ĕ�(sh��)��(j��)��(zh��)�д惦(ch��)��Ӌ(j��)��ͅR�۵Ȳ��������ڹ�(ji��)�c(di��n)һ�����늳ع�늣��Ķ��ڹ����O(sh��)Ӌ(j��)��Ҫ��(ji��)�c(di��n)����ǵ��ĵģ���˹�(ji��)�c(di��n)��̎���������惦(ch��)������ͨ����������(hu��)����(du��)�^�����ܵ��r(n��ng)���(f��)�s����Ȼ�h(hu��n)���l�����ƣ���Q��(ji��)�c(di��n)���a(b��)�九(ji��)�c(di��n)�������Dz��F(xi��n)��(sh��)�ġ���ˣ���β����^�ٹ�(ji��)�c(di��n)��(sh��)�F(xi��n)��Ч���ɿ����r(n��ng)����Ϣ�ɼ��ɞ��Щ���о��ğ��c(di��n)֮һ��
����Matthias�ȵ��о������Ƅ�(d��ng)�Կ������@�����o(w��)���W(w��ng)�j(lu��)�����ܣ����о��C��(sh��)���Ƅ�(d��ng)��(ji��)�c(di��n)�܉����ڟo(w��)���W(w��ng)�j(lu��)�в��ɔU(ku��)չ�o(w��)���W(w��ng)�j(lu��)�ķ�����5����Rahul�������Data MULEs(mobile ubiquitous local area network extensions)ģ�ͣ�����һ�N���Ӽܘ�(g��u)������(sh��)�F(xi��n)�������WSN֮�g�Ĕ�(sh��)��(j��)ͨ�ţ���ԓģ����MULEs���˻���܇�������������Ƅ�(d��ng)��(ji��)�c(di��n)��(l��i)�䮔(d��ng)��������(ji��)�c(di��n)�ʹ�ȡ��(ji��)�c(di��n)֮�g���Ƅ�(d��ng)��(du��)��[61��Ataul����������Ƅ�(d��ng)��(ji��)�c(di��n)��(sh��)�F(xi��n)��(sh��)��(j��)�ռ��ķӽY(ji��)��(g��u)ģ�͡�71��Imad�����һ�N���ßo(w��)�˙C(j��)�c���ԟo(w��)�����оW(w��ng)��Y(ji��)�ϵĿ�ܽY(ji��)��(g��u)����Ɍ�(du��)Ҏ(gu��)�t�ġ�����������ğo(w��)�����оW(w��ng)��(sh��)��(j��)�ɼ�����(sh��)�F(xi��n)������ݔ�ܵ��O(ji��n)��[8]�� Dong��������ßo(w��)�˙C(j��)�����ɼ�WSN�Д�(sh��)��(j��)pJ�� Martinez deDios��������ßo(w��)���w��ϵ�y(t��ng)�c�o(w��)�����оW(w��ng)�f(xi��)����(sh��)�F(xi��n)��Ҏ(gu��)ģ�h(hu��n)������Ч��(sh��)��(j��)�ɼ�[10-11�������և�(gu��)���о����ÿյ�?z��)o������ϵ�y(t��ng)��(sh��)�F(xi��n)��(sh��)�r(sh��)�ġ�����(du��)�Ļ�^��(du��)�����w��(d��ng)�B(t��i)��λ[12-141��Ҳ�в��և�(gu��)���о�ӑՓ���Ƅ�(d��ng)��ȡ�еľ��a��(w��n)�}[15-18���������Ƅ�(d��ng)��(ji��)�c(di��n)����(w��)�|(zh��)����(w��n)�}(QoS�� quality of service)[19‘20����UAV·�Ɇ�(w��n)�}[2l-233�Ͷ��UAV �f(xi��)ͬ���I(y��)��(w��n)��24�����ڇ�(gu��)��(n��i)���A���r(n��ng)�I(y��)��W(xu��)��־�G������Ї�(gu��)����ֲ�����I(y��)���ö��C(j��)�͡������I(y��)��ʽ���о��w�и߶Ⱥ��w���ٶȼ������L(f��ng)��(ch��ng)��(du��)�F�γ��e�cƯ�Ƶ�Ӱ�Ҏ(gu��)��[251���r(n��ng)�I(y��)���Ͼ��r(n��ng)�I(y��)�C(j��)е���о���Ѧ������о�Nһ3�͟o(w��)��ֱ���C(j��)ʩˎ��ʽ��(du��)���wʭ�͵��v���~������Ч����Ӱ푡�26�����Ї�(gu��)�r(n��ng)�I(y��)��W(xu��)��������о��O(sh��)Ӌ(j��)����׃��늳���(sh��)������ĺ���ʩˎ?k��)F�γ��e��������271����ϵ��о�UAV—WSNϵ�y(t��ng)MAC�f(xi��)�h��UAV��·��Ҏ(gu��)������281�����o(w��)�˙C(j��)�cWSN�Y(ji��)�ϑ�(y��ng)�����r(n��ng)����Ϣ�ɼ��c������̎�����о��A�Ρ�
�������о�����(j��)�Ї�(gu��)�Ϸ��r(n��ng)����Ϣ�ɼ������c(di��n)�cҪ�����һ�N�M���Ϸ��r(n��ng)����Ϣ�@ȡ�ɘ����c(di��n)�͔�(sh��)��(j��)�I(y��)��(w��)��������Ӽܘ�(g��u)�ğo(w��)�����оW(w��ng)�wϵ�Y(ji��)��(g��u)TUFSN(three.tire unmanned aerial vehicle farmland sensor network)��ԓ�wϵ�ܘ�(g��u)ͨ�^(gu��)�p�pWSN�Ђ�������(ji��)�c(di��n)�Ă�ݔ�΄�(w��)����(l��i)��(sh��)�F(xi��n)���L(zh��ng)���й�(ji��)�c(di��n)�ĉ���;ͨ�^(gu��)����(qi��ng)���^��(ji��)�c(di��n)�Ĺ��ܺ��Դ����(y��ng)���p�����ݔ��(ji��)�c(di��n)ʧЧ������YԴ����;ͨ�^(gu��)�Ƅ�(d��ng)��(ji��)�c(di��n)�ṩ�����þW(w��ng)�j(lu��)ͨӍ�|(zh��)�����������(g��)ϵ�y(t��ng)�Ĕ�(sh��)��(j��)�ɼ�Ч�ʺ�ϵ�y(t��ng)������29��30����
����1 TUFSNϵ�y(t��ng)
����1.1 TUFSNϵ�y(t��ng)�M��
����TUFSN�ɂ�������(ji��)�c(di��n)(SN��sensor node)�����^��(ji��)�c(di��n)(RN.relay node)���o(w��)���w����(UAV)����(sh��)��(j��)���� (DC��data center)��Ԫ�ؘ�(g��u)�ɣ���D1��ʾ��
������������(ji��)�c(di��n)�����w�eС���ܺĵ͡��r(ji��)���������c(di��n)�������и�֪���h(hu��n)�����M(j��n)�Пo(w��)��ͨ�ź��\(y��n)��ȹ��ܡ��@�(ji��)�c(di��n)���Ը�֪���ռ������؝�ȡ�pHֵ���h(hu��n)���؝�ȡ��L(f��ng)�����������F(xi��n)���r(n��ng)��h(hu��n)���еĔ�(sh��)��(j��)�������Ĵ�o(w��)����������(ji��)�c(di��n)��������һ��(g��)�^��ĵ���^(q��)���(n��i)���������M��һ��(g��)�ܼ��ğo(w��)��ad.hoc�������W(w��ng)�j(lu��)��ÿһ��(g��)��(d��)���ğo(w��)����������(ji��)�c(di��n)�ĸ�֪���������ģ����ɴ���������ƫ�h(yu��n)�r(n��ng)����Օ����ܡ���(y��n)�ᐺ�ӵķNֲ�h(hu��n)���еğo(w��)����������(ji��)�c(di��n)���M�ɵľW(w��ng)�j(lu��)����һ��(g��)�r(n��ng)����Ϣ�ֲ�ʽ��֪ϵ�y(t��ng)���Ϳ��Ԍ�(sh��)�F(xi��n)��(du��)��Ҏ(gu��)ģ�r(n��ng)����Ϣ��֪�c��(sh��)��(j��)�ɼ���
�������^��(ji��)�c(di��n)����Ҫ���������B�ӟo(w��)����������(ji��)�c(di��n)�c�Ƅ�(d��ng)�o(w��)���w����ͨӍ�c��(sh��)��(j��)��ݔ?sh��)Ę����͘м~�����^��(ji��)�c(di��n)��������Ҫ��֪�h(hu��n)����Ϣ��������^(q��)���r(n��ng)��o(w��)�����оW(w��ng)�Ĕ�(sh��)��(j��)���й�(ji��)�c(di��n)��֪ͨ�����څ^(q��)���(n��i)�Ă�������(ji��)�c(di��n)�ɼ���(sh��)��(j��)��������(sh��)��(j��)��������^��(ji��)�c(di��n)�ľ����У��ڽo����ͨӍ�r(sh��)�g��(n��i)����(sh��)��(j��)��ݔ�o�o(w��)���w������ÿһ��(g��)���^��(ji��)�c(di��n)֮�g�ľ��x���Ժ��L(zh��ng)������Ҫ�ͨ�š�һ����ԣ����^��(ji��)�c(di��n)����(du��)��������(ji��)�c(di��n)��(l��i)�f(shu��)����������(du��)�^��(qi��ng)���Դ����(y��ng)���^�L(zh��ng)�r(sh��)�g���������ڣ�����ͨ�^(gu��)�쾀����ȷ�ʽ�ṩ�^���ͨӍ������
�����o(w��)���w�������Ԏ���(d��ng)�����ɿ��ơ��y���Ƅ�(d��ng)ͨӍ�O(sh��)��Ĺ̶��������D(zhu��n)��o(w��)���{��w������������؏�(f��)ʹ�ã��](m��i)���{�œ�������b�����{�x���w���ˑB(t��i)���Ƶ��O(sh��)�䡣�o(w��)���w�����y�����Ƅ�(d��ng)ͨӍ�O(sh��)��֧�ֶ�NͨӍ�f(xi��)�h�Ͷ�NͨӍ�ӿڣ������Զ�NͨӍ��ʽ�c���������O(sh��)��ͨӍ�������w�����܉��ṩ�Դ����˔y�����O(sh��)��߂�һ�����\(y��n)�������ʹ惦(ch��)���ܣ����Ԍ�(sh��)�F(xi��n)��(sh��)��(j��)���s��̎������(d��ng)ͨӍ�|(zh��)�����Õr(sh��)���ĵ�����յ��Ĕ�(sh��)��(j��)�܉�惦(ch��)�ھ����У��ڻ֏�(f��)����ͨӍ�|(zh��)���r(sh��)���Ō���(sh��)��(j��)���ͽo��(sh��)��(j��)���ġ�
������(sh��)��(j��)�����ɷ���(w��)�����惦(ch��)����(sh��)��(j��)��(k��)��������Ϣϵ�y(t��ng)���r(n��ng)�����ϵ�y(t��ng)�����ٵľW(w��ng)�j(lu��)�������YԴ�M�ɡ���(sh��)��(j��)����ؓ(f��)؟(z��)�����ɟo(w��)���w������ݔ��(l��i)�Ĕ�(sh��)��(j��)����_����(sh��)��(j��)�������ԺͿɿ��ԣ���(sh��)��(j��)���Č��ռ����ĸ�֪��Ϣ�M(j��n)�нy(t��ng)Ӌ(j��)��������(sh��)��(j��)�ھ���(j��)�����ĽY(ji��)�������Q���ȡ����(y��ng)���Є�(d��ng)(�猦(du��)�o(w��)���w�����l(f��)��ָ��{(di��o)��·���ɼ���(sh��)��(j��)��)����(sh��)��(j��)���ĵĔ�(sh��)��(j��)���Ա��Ñ���Ӌ(j��)��C(j��)�������O(sh��)���L��(w��n)��ͨ�^(gu��)��(li��n)�W(w��ng)���Ƅ�(d��ng)��(li��n)�ṩ����(w��)�K�˵��L��(w��n)����������Ĕ�(sh��)��(j��)��Ϣ���Ѻ�ֱ�^�Ľ���չʾ��
����1.2 TUFSN�W(w��ng)�j(lu��)�wϵ�ܘ�(g��u)
����nJFSN��SN.RN��(sh��)��(j��)�ɼ��ӡ�RN-UAV���^��ݔ�Ӻ�UAV-DC�Ƅ�(d��ng)�R�یӽM�ɣ���D2��ʾ��
����1.2.1 SN—Rlq��(sh��)��(j��)�ɼ���
������(sh��)��(j��)�ɼ����ɂ�������(ji��)�c(di��n)�����^��(ji��)�c(di��n)֮�g�����ľW(w��ng)�j(lu��)��(g��u)�ɡ���(sh��)��(j��)�ɼ��ӾW(w��ng)�j(lu��)�����������c(di��n)��1)����Ӳ���YԴ������ڟo(w��)����������(ji��)�c(di��n)����ϵ�y(t��ng)�ąf(xi��)�h����Ҫ�M(j��n)�к�(ji��n)����2)�������������ڟo(w��)����������(ji��)�c(di��n)�������YԴ�^���Ҳ����S�r(sh��)�a(b��)��������һ����Դ�ıM���o(w��)����������(ji��)�c(di��n)���o(w��)���^�m(x��)����������3)�ֲ�ʽ������÷ֲ�ʽ�Y(ji��)��(g��u)�����еğo(w��)����������(ji��)�c(di��n)�����S�r(sh��)�M(j��n)���W(w��ng)�j(lu��)��4)�ԽM����ͨ�^(gu��)�Ӆf(xi��)�h�ͷֲ�ʽ�㷨���o(w��)����������(ji��)�c(di��n)�����l(f��)�،�(du��)�乤���^(gu��)���M(j��n)���m��(d��ng)?sh��)��{(di��o)�ȡ���(d��ng)�������ض��^(q��)����������l(f��)�ؽM��������(y��ng)�ľW(w��ng)�j(lu��)��5) ��(d��ng)�B(t��i)��?f��)䣺ϵ�y(t��ng)��һ��(g��)��(d��ng)�B(t��i)�ľW(w��ng)�j(lu��)�����еğo(w��)����������(ji��)�c(di��n)��(hu��)��?y��n)�ıM�����p�Ķ��˳��W(w��ng)�j(lu��)��Ҳ��(hu��)��?y��n)��΄?w��)����Ҫ���������M(j��n)��(d��ng)ǰ�ľW(w��ng)�j(lu��)����˾W(w��ng)�j(lu��)����?f��)�Y(ji��)��(g��u)�DŽ�(d��ng)�B(t��i)׃���ġ�6)�ܼ��ֲ������˼ӏ�(qi��ng)��Ŀ��(bi��o)��Ϣ�ɼ��^(q��)���΄�(w��)�O(ji��n)�أ������ğo(w��)����������(ji��)�c(di��n)��(hu��)�������@��(g��)�^(q��)��
�������ڔ�(sh��)��(j��)�ɼ��ӵ��@Щ���c(di��n)�����ԓ��ͨ���x�� IE��802.15.4�ľW(w��ng)�j(lu��)ͨ�Ņf(xi��)�h��(l��i)��(sh��)�F(xi��n)�������ܡ�IEEE 802.15.4�f(xi��)�h�ĵ���ʹ�ô�����Zigbee��IEEE 802.15.4 �f(xi��)�h�Ă�ݔ����һ��С��1Mbps�����Ҫ��(sh��)��(j��)��ݔ����ߣ�Ҳ����ʹ��IEEE 802.15.3�����ǸߵĂ�ݔ��Ҳ��ζ�����ߵ��ܺġ�ԓ��ͨ������mesh�ķ�ʽ�M�W(w��ng)���W(w��ng)�j(lu��)�ӴνY(ji��)��(g��u)ͨ�������ͽY(ji��)��(g��u)���(sh��)��Ӵ��ͽY(ji��)��(g��u)��
������SN.RN�ӣ���������(ji��)�c(di��n)��ɢ�����ڱ��O(ji��n)�y(c��)�r(n��ng)���У���(d��ng)�������;W(w��ng)�j(lu��)�ӴνY(ji��)��(g��u)�r(sh��)��ÿ��(g��)��������(ji��)�c(di��n)�H��һ��(g��)���^��(ji��)�c(di��n)�����ģ���������(ji��)�c(di��n)��ÿ��(g��)�O(ji��n)�y(c��)����ֻ�cһ��(g��)�̶������^��(ji��)�c(di��n)ͨӍ���M(j��n)�бO(ji��n)�y(c��)��(sh��)��(j��)��ݔ����������(ji��)�c(di��n)�c��������(ji��)�c(di��n)�ķֲ�����һ���ľ��x���֮�g��ͨӍ�����Ђ�������(ji��)�c(di��n)���ռ����Ĕ�(sh��)��(j��)��ֱ�ӅR����ָ�������^��(ji��)�c(di��n);��(d��ng)���Ø�(sh��)��Ӵ��ͽY(ji��)��(g��u)�r(sh��)��̎��������Ă�������(ji��)�c(di��n)ֻؓ(f��)؟(z��)��(sh��)��(j��)�ռ����ς���(sh��)��(j��)�Ĺ��ܣ�̎�����g�Ă�������(ji��)�c(di��n)�t��Ҫؓ(f��)؟(z��)��(sh��)��(j��)�ռ�߀Ҫؓ(f��)؟(z��)��(sh��)��(j��)�D(zhu��n)�l(f��)����������(ji��)�c(di��n)�c��������(ji��)�c(di��n)֮�g��(hu��)�ͨӍ�����Ђ�������(ji��)�c(di��n)���ռ����Ĕ�(sh��)��(j��)ͨ�^(gu��)ֱ�ӻ��g�ӵķ�ʽ�R����ָ�������^��(ji��)�c(di��n)��������Ȝp�ق�������(ji��)�c(di��n)�ڔ�(sh��)��(j��)��ݔ�^(gu��)�������ĵ���������(sh��)��Ӵ��ͽY(ji��)��(g��u)�ČӴβ��ܳ��^(gu��)3�ӡ���ȶ��ԣ����ͽY(ji��)��(g��u)ϵ�y(t��ng)�������ڸ��L(zh��ng)����(sh��)��Ӵ��ͽY(ji��)��(g��u)���w�ıO(ji��n)�y(c��)��e����ÿ��(g��)���^��(ji��)�c(di��n)�c���@�����܇������ɂ�(g��)�������Y(ji��)�c(di��n)�M��һ��(g��)���εĂ������W(w��ng)�j(lu��)�^(q��)��
����1.2.2 RN—UAV���^��ݔ��
�������^��ݔ�������^��(ji��)�c(di��n)��UAV�Ƅ�(d��ng)��(ji��)�c(di��n)֮�g�����ľW(w��ng)�j(lu��)��(g��u)�ɡ����^��ݔ�ӾW(w��ng)�j(lu��)�����������c(di��n)��1)�Y(ji��)��(g��u)��(ji��n)�Σ� UW�cRN֮�gֱ��ͨӍ����ֻ��һ����ֱ���B�ӷ�ʽ�� 2)�����^�ࣺRNһ�����̫�(y��ng)�ܹ�늣�UAV����ʹ�ÿɳ��늳ع�늡�3)��(w��n)���ɿ���UAV���ڿ����c����� RNͨӍ�����g�����ܵ�ֲ������ړ�������С���G���ʕ�(hu��)���͡�4)ͨӍ���x�L(zh��ng)��ͨӍ�|(zh��)���ã����ṩ�^���ʵ��쾀���w��
�����ļ��ݽǶȿ��]�����^��ݔ�ӿ����x������(qi��ng)��̖(h��o)�� IEEE 802.15.4�f(xi��)�h��Ҳ�����x�Â�ݔ���x���L(zh��ng)��IEEE 802.11�f(xi��)�h��ԓ�ӵ�RN֮�g�W(w��ng)�j(lu��)��?f��)�Y(ji��)��(g��u)�Ծ��ԽY(ji��)��(g��u)[rl ���߾W(w��ng)��Y(ji��)��(g��u)[5���������@�N��?f��)�Y(ji��)��(g��u)����UAV��ֱ���ķ�ʽ��(zh��)���΄�(w��)����(du��)�ڲ��Æ��������������UAV��(l��i)�f(shu��)���ڵ��_(d��)�ɼ���Ϣ�^(q��)���߅��̎��UAV�܉���ֱ���D(zhu��n)���ķ�ʽ�M(j��n)�뵽��һ�lֱ���Ĕ�(sh��)��(j��)�ɼ��^(q��)��
�������P(gu��n)֪�R(sh��)���]���r(n��ng)�I(y��)�����������ڿ����]http://www.lovetv5.com/lwcommon/30962.html
������RN-UAV�ӣ����^��(ji��)�c(di��n)����Ҏ(gu��)�t�ľ��Բ����S����(g��)���^��(ji��)�c(di��n)�ų�һ�ţ�������2��(g��)��(ji��)�c(di��n)�ֲ����x�锵(sh��)���ף�ÿ���е����^��(ji��)�c(di��n)�](m��i)�Д�(sh��)�����ƣ�����2��(g��)���^��(ji��)�c(di��n)֮�g���M(j��n)���κ�ͨӍ�c��(sh��)��(j��)��ݔ�����^��(ji��)�c(di��n)��ؓ(f��)؟(z��)ֱ�Ӕ�(sh��)��(j��)�ɼ����΄�(w��)����ؓ(f��)؟(z��)�������Ă�������(ji��)�c(di��n)��ݔ�^(gu��)��(l��i)�ıO(ji��n)�y(c��)��(sh��)��(j��)�惦(ch��)�������ľ��_�^(q��)�У��ȴ�UAV�^(gu��)��(l��i)�ռ���(sh��)��(j��)��
����1.2.3 UAV—DC�Ƅ�(d��ng)�R�ی�
�����Ƅ�(d��ng)�R�ی��Ɇ�(g��)�����(g��)UAV�Լ���(sh��)��(j��)����֮�g�����ľW(w��ng)�j(lu��)�M�ɡ�UAV��DC֮�g���÷�Cʽ��(sh��)��(j��)�W(w��ng)�j(lu��)ֱ�B���Ƅ�(d��ng)�R�یӾW(w��ng)�j(lu��)����ͨӍ���x�dz��L(zh��ng)�������e(cu��)�`�z�y(c��)�́G�������ܣ�֧��(sh��)�r(sh��)���ӕr(sh��)��(sh��)��(j��)��ݔ���Y(ji��)��(g��u)��(ji��n)�ε����c(di��n)��
����2 TUFSNԭ������
��������IEEE 802.15.4���ľW(w��ng)�j(lu��)�ͷ�Cʽ�W(w��ng)�j(lu��)�����Է������кܶ�ɹ�����ˣ����о���Ҫ��UAV�cRN֮�g�����c(di��n)�������M(j��n)�з�����UAV�cRN֮�g��(sh��)��(j��)���Q�r(sh��)��ƽ��ʾ���P81Ҋ(ji��n)�D3��
����3�����c�Y(ji��)������
��������(j��)ʽ(1)��ʽ(8)��ʹ��Matlab���湤�ߣ��O(sh��)��UAVͨӍ�돽��С���w�и߶Ⱥ��w���ٶȵȅ���(sh��)���������^��(ji��)�c(di��n)��UAV����Ҫ�ľ����С��
�����ĈD4a��֪��RN��ͨӍ�돽��30m���ϕr(sh��)�����ԫ@��45 m����ͨӍ�r(sh��)�g��RN��ͨӍ�돽��20 m�ԃ�(n��i)�r(sh��)��ֻ�ܫ@��35 m�ԃ�(n��i)��ͨӍ�r(sh��)�g��RN��ͨӍ�돽������(n��i)��(y��ng)�M�������w�и߶ȁ�(l��i)�M��ͨӍ��ݔ��Ҫ�ĕr(sh��)�g���ĈD 4b������Ҋ(ji��n)UAV���w���ٶȼӿ�r(sh��)��UAV�cRN֮�g�܂�ݔ?sh��)Ĕ?sh��)��(j��)�p�٣�RN�ľ����c�w���ٶȳɷ��ȡ��ĈD 4c������Ҋ(ji��n)UAV���w�и߶����ӕr(sh��)��UAV�cRN֮�g�܂�ݔ?sh��)Ĕ?sh��)��(j��)�p�٣�RN�ľ����c�w�и߶ȳɷ��ȡ����w���ԣ��ٶȌ�(du��)RN�����Ӱ푴��^(gu��)�߶Ȍ�(du��)�����Ӱ푡�
����UAV�c��(sh��)��(j��)���ĵ�ͨӍ��ͨ�^(gu��)��C�W(w��ng)�j(lu��)��(sh��)�r(sh��)���͔�(sh��)��(j��)����ˣ���Փ��UAV�ľ����cRN�ľ��汣��һ�Ӵ�С�Ϳ��ԡ����]��UAV�ľ��治��(hu��)�oUAV����(l��i)̫���ؓ(f��)��(d��n)���ڷ�C�W(w��ng)�j(lu��)��̖(h��o)����õĵط���������r�����w���^(gu��)���Пo(w��)�����͔�(sh��)��(j��)�����Ԍ�UAV�ľ����O(sh��)�Þ����^��(ji��)�c(di��n)��(g��)��(sh��)����RN�ľ����С���@��UAV�ڈ�(zh��)����������Ϣ�ɼ��΄�(w��)����ͨ�^(gu��)�x����ʽ���͔�(sh��)��(j��)��
��������UAV���Ƅ�(d��ng)���ܺ�Ч���h(yu��n)�h(yu��n)����Data MULEs ģ���������Ƅ�(d��ng)��(ji��)�c(di��n)���ˡ����������C(j��)�ȣ�UAV�Ƅ�(d��ng)��(ji��)�c(di��n)�܉�������ռ����^��(ji��)�c(di��n)�Ĕ�(sh��)��(j��)��ֻ����һ��(g��)�Ƅ�(d��ng)��(ji��)�c(di��n)����(sh��)��(j��)��ݔ�ɹ��ʞ�90%�ėl����(du��)2��(g��)ϵ�y(t��ng)�M(j��n)�б��^��UAVϵ�y(t��ng)�е����^��(ji��)�c(di��n)����s��3��13 kB(��D 4b��4c����ʾ)����MULEsϵ�y(t��ng)�е����^��(ji��)�c(di��n)����s�� 1.6��163 kBt6l����ȶ��ԣ�����UAV���Ƅ�(d��ng)��(ji��)�c(di��n)�ğo(w��)�����оW(w��ng)�����^��(ji��)�c(di��n)��ƽ��������g�����O(sh��)Ӌ(j��)�ø���С���Ķ��������^��(ji��)�c(di��n)�ܺĺ�ʹ�óɱ���
����4ԇ�(y��n)���Y(ji��)������
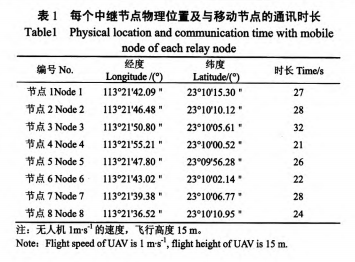
����2015��2��3�����A���r(n��ng)�I(y��)��W(xu��)�̌W(xu��)��(sh��)��(x��)�����M(j��n)��ԇ�(y��n)��ԇ�(y��n)�x����һ��(g��)�Nֲ���ĵ؉K�����й�(ji��)�c(di��n)��������d��5ω�İ�����o(w��)�˙C(j��)���o(w��)�˙C(j��)�y���˰����Դ�� ZigbeeͨӍģ�K����(sh��)��(j��)̎��ģ�K��3Gģ�K�ķ��b�������沼����8��(g��)���^��(ji��)�c(di��n)��ÿ��(g��)���^��(ji��)�c(di��n)֮�g�ľ��x���^(gu��) 150m���Դ_��ÿ��(g��)���^��(ji��)�c(di��n)����(hu��)�ɔ_��Ӱ푵������؉K��(n��i)�Ĺ�(ji��)�c(di��n)������ÿ��(g��)���^��(ji��)�c(di��n)��߅�����ͽY(ji��)��(g��u)������2�� 4��(g��)��������(ji��)�c(di��n)���@Щ��������(ji��)�c(di��n)ֻ�c�Լ������������^��(ji��)�c(di��n)ͨӍ����D5��ʾ���o(w��)�˙C(j��)��1 rrgs���ٶȡ�15 m �߶��ڿ��а����A(y��)���O(sh��)����܉�E�w�У��w���^(gu��)�������M(j��n)�����^��(ji��)�c(di��n)N��ͨ�ŷ����r(sh��)�������c��(ji��)�c(di��n)N����ͨ�ţ����ɼ��r(n��ng)�(sh��)��(j��)��
�����ڹ�(ji��)�c(di��n)·�����ɰ��l(f��)���l�ʞ�30 S���W(w��ng)�j(lu��)�����z�y(c��)���l(f��)���l�ʞ�36 s�ėl�����M(j��n)�Мy(c��)ԇ����(ji��)�c(di��n)������λ�÷ֲ����1���Y(ji��)��������ÿ��(g��)���^��(ji��)�c(di��n)�c�Ƅ�(d��ng)��(ji��)�c(di��n)֮�g��ͨӍ�r(sh��)�L(zh��ng)���ǹ̶���׃�ģ��W(w��ng)�j(lu��)�����B�ӵĕr(sh��)�g�ܵ��r(n��ng)�������L(zh��ng)�̶Ȳ�ͬ������߰���ͬ��Ӱ푣�UAV�Ƅ�(d��ng)�W(w��ng)�j(lu��)�M�W(w��ng)�͔�(sh��)��(j��)��ݔ?sh��)�ƽ���r(sh��)�L(zh��ng)��26 s��——Փ�����ߣ�����1��һ���_�a��1�����m���1���S־��2 ���Q2�����^��1
����[�����īI(xi��n)]
����[1�� Jennifer Y��Biswanath M��Dipak G.Wireless sensor network survey߶.Computer Networks��2008��52(12)��2292--2330.
������2�� ���Ϻ��ᣬ���£���.�o(w��)���������W(w��ng)�j(lu��)�о��M(j��n)չ�.Ӌ(j��)��C(j��)�о��c�l(f��)չ��2005��42(1)��163—174. Cui Li��Ju Hailing��Miao Yong��et a1.Overview of wireless sensor network[J].Journal of Computer Research and Development��2005��42(1)��163—174.(in Chinese with English abstract)
����[3��Xiao Kehui��Xiao Deqin��Luo Xiwen.Smart water-saving irrigation system in precision agriculture based on wireless sensor network[J].Transactions of the Chinese Society of Agncultural Engineering(Transactions of the CSAE)��2010�� 26(11����170һ175.Ф���x��Ф���٣��_�a��.���ڟo(w��)���������W(w��ng)�j(lu��)�ľ���(x��)�r(n��ng)�I(y��)���ܹ�(ji��)ˮ���ϵ�y(t��ng)[J].�r(n��ng)�I(y��)�����W(xu��)��(b��o)��2010��26(1 1)�� 170һ175.(in English with Chinese abstract)
����[4�� Ф���٣���־�����T���ѣ���.����ˮ�ֱO(ji��n)�y(c��)�o(w��)���������W(w��ng)�j(lu��)��(y��u)���O(sh��)Ӌ(j��)�cԇ�(y��n)[J��.�r(n��ng)�I(y��)���̌W(xu��)��(b��o)��2011��27(2)�� 174—179. Xiao Deqin��Gu Zhichun��F(xi��n)eng Jianzhao��et a1.Design and experiment of wireless sensor networks for paddy field moisture monitoring[J].Transactions of the Chinese Society ofAgricultural Engineering(Transactions ofthe CSAE)��201 1�� 27(2)��174—179.(in Chinese with English abstract)
����[5�� Matthias G��David T.Mobility increases the capacity of ad·hoc wireless networks[J].IEEE/ACM Transactions on Networking��2002��10(4)��477--486.
������6��6 Rahul C��Sumit R��Sushat J��et a1.Data MULEs��Modeling a three—tier architecture for sparse sensor networks[C].Istanbul�� IEEE SNPA(First IEEE International Workshop on Sensor Network Protocols and Applications).2003��30—41.
����[7�� Bad A��Chen Ying��Jaekel A��et a1.A new architecture for hierarchical sensor networks with mobile data collectors[C]. Kolkata��International Conference on Distributed Computing and Networking.2010��116—127.
����[8�� Imad Jawhar��Nader Mohamed��Jameela A1-Jaroodi��et a1.A framework for using unmanned aerial vehicles for data collection in linear wireless sensor networks[J].Journal of Intelligent and Robotic Systems��2014��74(1/2)��437--453.
����[9�� Mianxiong Dong��Kaoru Ota��Man Lin��et a1.UAV.assisted data gathering in wireless sensor networks��.The Journal of Supereomputing��2014��70(3)��1 142—1 155.