�l(f��)���r(sh��)�g�����ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ: �O(sh��)Ӌ(j��)��һ�Nݔ늾�·�����C(j��)���˵ęC(j��)е�Y(ji��)��(g��u), ������ԓ�C(j��)��(g��u)�����I(y��)���g���}. ��Ӌ(j��)���^����, ����Monte Carlo�����õ��˙C(j��)���˲����۵Ĺ������g. ����ԓ�����ɱ��⌦(du��)�C(j��)�����\(y��n)��(d��ng)���̵������Ӌ(j��)��, �O��غ�����Ӌ(j��)���^��. ������ָ�����y(t��ng)�ęC(j��)���˹������g߅����ȡ������
����ժҪ: �O(sh��)Ӌ(j��)��һ�Nݔ늾�·�����C(j��)���˵ęC(j��)е�Y(ji��)��(g��u), ������ԓ�C(j��)��(g��u)�����I(y��)���g���}. ��Ӌ(j��)���^����, ����Monte Carlo�����õ��˙C(j��)���˲����۵Ĺ������g. ����ԓ�����ɱ��⌦(du��)�C(j��)�����\(y��n)��(d��ng)���̵������Ӌ(j��)��, �O��غ�����Ӌ(j��)���^��. ������ָ�����y(t��ng)�ęC(j��)���˹������g߅����ȡ������������, �Ҵ�����Փ�ϵ�ȱ��; �����һ�N�µĻ��ھֲ��c(di��n)���ֲ���߅���c(di��n)��ȡ����, ���нo������������, ԓ�������H���ȸ�, ���ҷdz��m����̎��C(j��)���˹������g߅�熖�}.
�����P(gu��n)�I�~: ݔ늾�; �����C(j��)����; �������g; ���ؿ��_����
����1 ����(Introduction)
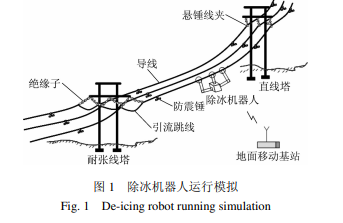
�����͂��y(t��ng)�ij����������, ���ÙC(j��)���˳������й���С���ɱ��͡�Ч�ʸߡ��ˆT�o�������o��ͣ늺Ϳ��B�m(x��)���I(y��)�ȃ�(y��u)�c(di��n). ����һ�N������˹����I(y��)��ݔ늾�·�ھ��������g(sh��), ��l(f��)չǰ���dz��V��[1∼3] . �D1��ʾ������C(j��)���ˬF(xi��n)���\(y��n)��ģ�M�D, ���������ݔ늾����ߺ���ɾ�·����, �C(j��)������Ҫ��Խݔ늾�·�ϳ��F(xi��n)�ĸ��N��(f��)�s�ϵK��.
�����C(j��)���˵Ĺ������g���x��ĩ�ˈ�(zh��)�����ڽY(ji��)��(g��u)���Ɨl���������_(d��)��������λ�õļ���, ���Ǻ��������C(j��)����Խ��������һ��(g��)��Ҫָ��(bi��o). ���˱��ڷ���, ������Ҫ�_���C(j��)���˵Ĺ������g����. Ŀǰ�^�鳣�õķ����ǽ������͔�(sh��)ֵ������. �������ǻ���Jacobian���Ӌ(j��)���\(y��n)��(d��ng)�W(xu��)����Դ_���C(j��)���˹������g�ķ���. ����Ӌ(j��)��ď�(f��)�s��, ԓ����ֻ��̎��ijЩ�ض��Y(ji��)��(g��u)�ęC(j��)���˹������g���}[4,5] . ���֮��, ���Ô�(sh��)ֵ�����������`�����, ������ߴ����Ե����īI(xi��n)[6,7]����Ļ����S�C(j��)���ʵ����ؿ��_Ӌ(j��)�㷽��. ����ԓ�����o�茦(du��)�C(j��)�����\(y��n)��(d��ng)�����M(j��n)������Ӌ(j��)��, ��˷dz��m���ڷ����C(j��)���˹������g���}. ����, �������ؿ��_����ֻ�ܵõ��C(j��)���˹������g�Ľ��ƈD������. ���˱���Ӌ(j��)��ͷ����������g��С, �īI(xi��n)[8]���ÖŸ���ȡ�˙C(j��)���˹������g߅���c(di��n), ��������С���˔M�ϵķ�������˹������g߅�������Ľ������_(d��)ʽ. ����, �īI(xi��n)[8]�����߅���c(di��n)��ȡ������������, ����ԓ������ȡ��߅���c(di��n)ֻ�nj�(sh��)�H߅���c(di��n)��һ�N���Ʊ�ʾ. �īI(xi��n)[9]���÷ֶ���Oֵ�ķ����mȻ�܉��(zh��n)�_����ȡ��߅���c(di��n), �������㷨����������, �o���_������߅���c(di��n)��λ�÷ֲ�. ����, ͨ�^���ĵķ�����֪, ��ʹ�ɹ���ȡ�������еĹ������g߅���c(di��n), ���������ɷN����̎��C(j��)���˹������g���}�Դ���ȱ�c(di��n)�Ͳ���.���Č��������ؿ��_������(du��)�O(sh��)Ӌ(j��)��һ�N����ʽ�����C(j��)�������I(y��)���g���}�M(j��n)�з���, ͬ�r(sh��)��(du��)�C(j��)���˹������g߅���c(di��n)����ȡ���}�M(j��n)��Ԕ��(x��)��ӑՓ.
����2 �����C(j��)���˱��w�C(j��)��(g��u)�O(sh��)Ӌ(j��)(Structure design of de-icing robot)
�������ڳ������I(y��)�ĭh(hu��n)���dz�����, ��(du��)�C(j��)���˱��w�C(j��)��(g��u)�ɿ��Ժ��\(y��n)�еķ�(w��n)����Ҫ��ܸ�. �����ھC�Ͽ��]�ˇ���(n��i)��F(xi��n)���^������Ѳ���C(j��)���˷����Ļ��A(ch��)��[1∼3] , �O(sh��)Ӌ(j��)��һ�N����ʽ�����C(j��)���˽Y(ji��)��(g��u), ��D2��ʾ, �C(j��)���˱��w������3��(g��)�`�əC(j��)е�ۺ����g���w�M��: ǰ����۽Y(ji��)��(g��u)��ͬ, �քe�ɴ�С�ۺ�ĩ�ˊA�����M��, ����c���w�B��̎����P(gu��n)��(ji��), ����(j��)Խ����Ҫ�Ɍ�(sh��)�F(xi��n)���Һ������`���D(zhu��n)��(d��ng); С�۞����s�ֱ�, ���L�ȿ��{(di��o), ��ۺ�С���B��̎�����P(gu��n)��(ji��), ����(j��)��Ҫ�������D(zhu��n)��(d��ng); ���g�ֱ۞����s��. ���ֱ�ĩ�˞��(f��)�ϊA�֙C(j��)��(g��u), ͬ�r(sh��)�߂��(q��)��(d��ng)���A�ֺͳ����ȹ���, ���(n��i)���Y(ji��)��(g��u)��D3��ʾ. �A�֙C(j��)��(g��u)�O(sh��)Ӌ(j��)�ɿ������_�ϵĽY(ji��)��(g��u), ݔ늾��ĊA�������g���^, ��ǰ��ˮƽ�M���b�В쾀�L݆, �Ա��ڙC(j��)���˒쾀����, ͬ�r(sh��)�ɽ��͊A������(du��)��(d��o)����ĥ�p. ˮƽ�M���S�A�����_��, ���]�ϕr(sh��)����Ш���ι��B�Ӄɶ�,����ˤ������. �A������(n��i)���O(sh��)Ӌ(j��)��4��(g��)�Qֱ�ĝLͲ�C(j��)��(g��u). ��˵�һ��(du��)���(q��)��(d��ng)�LͲ, ������x�þ���һ�����ԡ�Ħ��ϵ��(sh��)�����ĥ�����Ƴ�, ͨ�^�o��늾�, �Ɍ�(sh��)�F(xi��n)�Ƅ�(d��ng)�����ߵȹ���. ǰ�˵�һ��(du��)������LͲ, ��M��������ͻ�X�Y(ji��)��(g��u), �Ɍ�(sh��)�F(xi��n)�뉺ʽ�����Ĺ���, ���ֹ�����r(sh��)�p��늾�, �����LͲ�ⲿ�g���Դ���늾��⏽. �ɽM�LͲ���g�b�В߱�ˢ, �Á�߳�늾��ϵĚ������. ����, �ڊA����ǰ���b�г����N, ͨ�^һ��(g��)���݆�C(j��)��(g��u)����(d��ng)���Ɏ���(d��ng)�����N����(f��)�����Ó�����, ��һ���̶��ϰѸ�����������, �������(g��)�C(j��)��(g��u)�ij���Ч��. �A�����c�ֱ۵��B��̎�����P(gu��n)��(ji��), ���ڙC(j��)���ˊA�֙C(j��)��(g��u)���ˑB(t��i)�{(di��o)��. ���g���w���ڰ����Դ��Ϳ�����.
�����C(j��)���˲��ÑҒ�ץ�����\(y��n)��(d��ng)��ʽ. ���˱��C�\(y��n)�еķ�(w��n)����, ��Խ�ϕr(sh��)��(y��ng)�_��ʼ�K�Ѓɂ�(g��)�ֱۑҒ��ھ�·��. ���, �����O(sh��)Ӌ(j��)�����ֱ�����Ó��Խ�ϵķ�ʽ, ����, ���g�ֱ���Ҫ��(w��n)�����ĵ�����, ǰ�����ֱ۞�Խ�ϱ�, ��ĩ�ˊA�������ܵ��_(d��)������λ�õļ��ϼ������˙C(j��)���˵Ĺ������g. ���˱��ڷ���, �Լ��P(gu��n)��(ji��)��ԭ�c(di��n), �C(j��)���˱��w��ݔ늾������Qֱƽ���X-Z�S, ������D4��ʾ���g��������(bi��o)ϵ.
������(du��)�ڈD4��ʾ���g���B�U�C(j��)��(g��u), ����(j��)D-H����(sh��)��[10]����څ�������(bi��o)ϵ�����P(gu��n)��(ji��)׃��θ��ʾ�Ĺ����c(di��n)P��λ������:���ڌ�(sh��)�H�Y(ji��)��(g��u)������, �P(gu��n)��(ji��)׃��θ1, θ2����һ��������(n��i)׃����; ����, ���������C(j��)�������I(y��)�r(sh��)�p��ݔ늾�·�Ͻ������, ���O(sh��)Ӌ(j��)�^����ͨ����(du��)�P(gu��n)��(ji��)�P(gu��n)�����(d��ng)�������������Դ_��һ���İ�ȫ���I(y��)���g.
����3 ���� Monte Carlo ������ �������g��� (Solving the workspace based on Monte Carlo method) Monte Carlo
����������һ�N�������S�C(j��)��Ӂ���Q��(sh��)�W(xu��)���}�Ĕ�(sh��)ֵ����. ��(du��)�ڈD4��ģ��, ��׃�����S׃��������(n��i), ͨ�^�S�C(j��)��ȡ��һ�M׃��ֵ {(θ1)i , (θ2)i ,(a2)i}, ���Դ_��һ��(g��)�������gλ������(bi��o)ֵPi , ��(d��ng)��ȡ�Ęӱ�����N����r(sh��), ���c(di��n)����{Pi}(i = 1, 2, · · · , N)���ɽ��Ƶ����L���C(j��)���˵Ĺ������g, ������ȡ���S�C(j��)�c(di��n)��(sh��)ĿԽ��, �õ��Ĺ������g��Խ���_, �Π�ҲԽ����. ���w��ⲽ�E��:
����Step 1 ��C(j��)���˵��\(y��n)��(d��ng)�W(xu��)����, �_���C(j��)����ĩ�ˈ�(zh��)�����څ�������(bi��o)ϵ�е�λ�÷���, �籾��ʽ(1) ��ʾ;
����Step 2 ���P(gu��n)��(ji��)׃����׃��������(n��i), ��������N ��(g��)����ֲ����S�C(j��)ֵ, �Ķ��ɵõ�N�M׃��ֵ�ĽM��;
����Step 3 ���S�C(j��)���ɵ�N�M׃��ֵ��������õ�λ�÷���, �õ�N��(g��)ĩ�ˈ�(zh��)����������(bi��o)ֵ, ���䌦(du��)��(y��ng)������(bi��o)ֵ�քe����ָ���ľ����;
�������P(gu��n)֪�R(sh��)���]���C(j��)�����I(l��ng)����ͨ�ڿ����]
����Step 4 ������õ�λ���c(di��n)�@ʾ����, ���γ��˙C(j��)�����ֱ۹������g�c(di��n)����“�ƈD”. �D5�͈D6�քe�鱾�IJ���Monte Carlo������õij����C(j��)����ǰ����X-Zƽ��Ϳ��gƽ���(n��i)�Ĺ������g�D��(N = 6000).
����4 �������g߅�����ȡ(Extracting boundary of workspace)
��������Monte Carlo����ֻ�ܵõ��C(j��)���˹������g�Ľ��ƈD������. ���˱���Ӌ(j��)��ͷ����������g�Ĵ�С, ��(zh��n)�_����ȡ���������g��߅���c(di��n)�Ƿdz��P(gu��n)�I�IJ��E, Ŀǰ�^�鳣�õķ����ǖŸ͘Oֵ��[8,9] .
����4.1 �Ÿ�(Grid method)
������D7��ʾ, �Ÿ���Ҫ˼����: ���������g���֞�N��(g��)�xɢ�������ξW(w��ng)��, ��ÿ��(g��)��Ԫ�x0��1; �����Ԫ�����й����c(di��n), ��Ԫֵ�x1, ��t�x0. ͨ�^����߅���Ԫ�����c(di��n), �ɵ������Єe�l��: ����cĿ��(bi��o)��Ԫ������8��(g��)��Ԫ������1��(g��)��0, ͬ�r(sh��)Ŀ��(bi��o)��Ԫ��1�r(sh��), ԓ��Ԫ��߅���Ԫ, �˕r(sh��)�����Æ�Ԫ��(n��i)�c(di��n)����ƽ������(bi��o)���Ƶı�ʾ߅���Ԫ�c(di��n)����(bi��o).
�����@Ȼ, ���ÖŸ���ȡ����߅���c(di��n)ֻ�nj�(sh��)�H߅���c(di��n)��һ�N���Ʊ�ʾ. �D8��ʾ����ȡ��߅���c(di��n)�ڌ�(sh��)�H�������g�п��ܵ�3�Nλ�÷ֲ�(�Ӱ�^(q��)��?y��n)�?sh��)�H�������g).
����4.2 �Oֵ��(Extremum method)
������D9��ʾ, ���������g���Є���, ����AB, CD ֮�g�^(q��)��?y��n)�һ�? ���Ȟ�∆L. �ҳ�ԓ�^(q��)���(n��i)Z����(bi��o)�����ϵĘO��ֵ�c(di��n)a�͘OСֵ�c(di��n)d, �@���c(di��n)����ԓ�^(q��)����ϡ��ɂ�(g��)��߅���c(di��n). ���ԓ�^(q��)����ڃ�(n��i)߅��, ͨ�^�����Oֵ�ķ����t�o���ҵ���(n��i)߅���c(di��n), �@�r(sh��)�ɲ��õķ�����: ��ԓ�^(q��)���(n��i)�c(di��n)Z����(bi��o)���Ĵ�С�������, Ȼ�����c(di��n)�Д��ɂ�(g��)�����c(di��n)��Z����IJ�ֵ�Ƿ�����A(y��)���O(sh��)����һ��(g��)�Єeֵ. ������ڴ���ԓ�Єeֵ�ă��c(di��n), �t�f��ԓ�^(q��)���(n��i)���ڃ�(n��i)߅��, ����ԓ�������c(di��n)�����(n��i)߅���c(di��n)(��D9��ʾb, c���c(di��n)).
�����@Ȼ, ���÷ֶ���Oֵ�ķ���ֻ����ȡ����߅���c(di��n). ��������������(�sС∆L), ��ȡ����߅���c(di��n)����Խ�ӽ���(sh��)�H߅��. ����, ��ʹ�ɹ�����ȡ��������߅���c(di��n), ��Ȼ�y�Ԝ�(zh��n)�_��?c��i)M�ϳ��C(j��)���˹������g, �@��Ҫ�������S�C(j��)�a(ch��n)����߅���c(di��n)��������ȫ�M�ό�(sh��)�H߅����ɵ�. ��(du��)��ͬһ���xɢ߅���c(di��n), ��ɔM�ϳɵ�������ʽ�����Dz��_����. ��������:
�����D10��ʾ���ȡ��һ�ι������g, �c(di��n)a, b, c, d�� e��ԓ�^(q��)���(n��i)�B�m(x��)������߅���c(di��n). �t���L�C(j��)���˹������g���挍(sh��)߅�������Π��п�������D11��ʾ�ɷN����֮һ: 1) �挍(sh��)߅��δ����b, d���c(di��n); 2) �挍(sh��)߅�����b, d���c(di��n).
����һ����f, �C(j��)����ĩ�ˈ�(zh��)�����Ĺ���܉�E��С������(n��i)��(y��ng)�ǹ⻬��, ���^�D11�ɷN��r, ��D���挍(sh��)�ķ���(y��ng)�˙C(j��)���ˌ�(sh��)�H�Ĺ������g�ΑB(t��i), �S�C(j��)�a(ch��n)����߅���c(di��n)b, d��δ�M�ό�(sh��)�H߅��. ���, ����ȡ�ͷ����C(j��)���˹������g߅�熖�}�r(sh��), ��(du��)�������b, d��͵�߅���c(di��n)����ܮ�(d��ng)�Ƀ�(n��i)���c(di��n)��̎��, �@Ȼ, ���Â��y(t��ng)��߅���c(di��n)��ȡ�����o��̎���@�N��r.
������2����ÖŸ͘Oֵ����Ӌ(j��)��Y(ji��)��. ��(d��ng)�S�C(j��)�c(di��n)��(sh��)���^�ٕr(sh��), ���ÖŸ͘Oֵ������ȡ����Ҫ���@���ڱ����㷨����ȡ����; �S���S�C(j��)�c(di��n)��(sh��)Ŀ������, �ɷN��������ȡ������������, �����w���f, ���߾���Ҫ���ڱ��ĵ���ȡ����. ����, ����(j��)�D8��ʾ�Ÿ���ȡ����߅���c(di��n)λ�÷ֲ����c(di��n), ��(du��)�ڱ������A��߅��Ĺ������g, ���ږŸ�Ӌ(j��)��õ��Ŀ��g��e��(y��ng)��С����Փֵ, ��2��Ӌ(j��)��Y(ji��)���c��Փ�����ĽY(ji��)����һ�µ�.
�����D13����ñ��ķ�����ȡ���ĈD5��ʾ�������g��߅��, Ӌ(j��)��ӱ���(sh��)Nȡ10�f��(g��)�c(di��n), ��Ҋ, ���ñ��ķ�����ȡ����߅������^�õĔM�϶Ⱥ����.
����6 �Y(ji��)Փ(Conclusions)
����1) �O(sh��)Ӌ(j��)��һ�N����ʽ�����C(j��)���˽Y(ji��)��(g��u), �о���ԓ�C(j��)��(g��u)�����I(y��)���g���}. ��Ӌ(j��)���^����, ����Monte Carlo����Ӌ(j��)��C(j��)���˵Ĺ������g, ������ֱ�ӌ�(du��)�C(j��)�����\(y��n)��(d��ng)�W(xu��)���̵�������^��, ������Ӌ(j��)��.
����2) ᘌ�(du��)ԭ��߅���c(di��n)��ȡ�����IJ���, �����һ�N���������c(di��n)���ֲ���߅���c(di��n)��ȡ����, ��ԭ�еķ������, ���ĵķ������H���ȸ�, ���ҿ����^�õ�̎��C(j��)���˹������g�c(di��n)���е�“̓��߅���c(di��n)”.
����3) ��Ŀ��(bi��o)�c(di��n)��ԭ�c(di��n)�������g����(bi��o)ϵ, ��������Ğ�������. ���������c(di��n)���ֲ���߅���c(di��n)��ȡ�������ƏV��3�S���g߅���c(di��n)���ж�. ——Փ�����ߣ�ӡ ��, ��ҫ��, ���ɽ
���������īI(xi��n)(References):
����[1] ���, ���ԝ�, �T��. �s���l���µ�Ѳ���C(j��)�������\(y��n)��(d��ng)�W(xu��)���[J]. ������Փ�c��(y��ng)��, 2006, 23(1): 44 – 48. (LI En, LIANG Zize, TAN Min. Analysis of solution to the inverse kinematics of inspection robot for power transmission lines with constraints[J]. Control Theory & Applications, 2006, 23(1): 44 – 48.)
����[2] POULIOT N, MONTAMBAULT S. Geometric design of the Linescout, a teleoperated robot for power line inspection and maintenance[C] //2008 IEEE International Conference on Robotics & Automation. Pasadena: IEEE, 2008: 3970 – 3977.
����[3] ���L(f��ng)��, ���O��, �ǐۇ�, ��. �߉�Ѳ���C(j��)���˵��O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n)[J]. �C(j��)е�ƌW(xu��)�c���g(sh��), 2006, 25(5): 624 – 626. (ZHOU Fengyu, LI Yibin, WU Aiguo, et al. Design and implementtation of inspection robots for high voltage power transmission lines[J]. Mechanical Science and Technology, 2006, 25(5): 624 – 626.)
����[4] WANG Y F, CHIRIKJIAN G S. A diffusion-based algorithm for workspace generation of highly articulated manipulators[C] //Proceedings of IEEE International Conference on Robotics & Automation. Washington: IEEE, 2002: 1525 – 1530.
����[5] CHEN X, GUPTA K C. Geometric modeling and visualization of manipulator workplace[J]. ASME Computers in Engineering, 1991, 1(5): 469 – 474.
����[6] RASTEGAR J, PEREL D. Generation of manipulator workspace boundary geometry using the Monte Carlo method and interactive computer graphics[J]. ASME Journal of Mechanical Design, 1990, 112(3): 452 – 454.
����[7] RASTEGAR J, FARDANESH B. Manipulator workspace analysis using the Monte Carlo method[J]. Mechanism and Machine Theory, 1990, 25(2): 233 – 239.
����[8] ALCIATORE D, NG C. Determining manipulator workspaceboundaries using the Monte Carlo method and least squares segmentation[C] //23rd ASME Mechanisms Conference. Minneapolis: ASME Press, 1994: 141 – 146.
����[9] ����, �����, ���t, ��. 3�S�C(j��)���˹������g�����`�����[J]. �C(j��)е�ƌW(xu��)�c���g(sh��), 2006, 25(12): 1459 – 1502. (CAO Yi, LI Xiujuan, NING Yi, et al. Computation and geometrical error analysis of a 3D robot’s workspace[J]. Mechanical Science and Technology, 2006, 25(12): 1459 – 1502.)
����[10] ���Ђ�. �C(j��)���˼��g(sh��)���A(ch��)[M]. ��h: �A�пƼ���W(xu��)������, 2008.