�l���r�g�����ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ��ᘌ����yݔ늾�·��������Ч�ʵͺͰ�ȫ�Բ�Ć��}�������һ�N���ʽݔ늾�·�����C���ˡ�ԓ�C���˲������ی��Q�Y�����܉���ݔ늾�·�ϸ�Ч������Խ�����ߡ��ڴ˻��A�ϣ������R������׃�Q���M�ЙC���˵��\�ӌW�����������C�����\�ӌW�����淽�����⣬�����˙C
����ժҪ��ᘌ����yݔ늾�·��������Ч�ʵͺͰ�ȫ�Բ�Ć��}�������һ�N���ʽݔ늾�·�����C���ˡ�ԓ�C���˲������ی��Q�Y�����܉���ݔ늾�·�ϸ�Ч������Խ�����ߡ��ڴ˻��A�ϣ������R������׃�Q���M�ЙC���˵��\�ӌW�����������C�����\�ӌW�����淽�����⣬�����˙C������Խ���^�����ֱ�λ���c���P��׃��֮�g���Pϵ������ ADAMS�h�����C���˿�Խ�Ҵ����A�^���M���\�ӌW���档����Y���;�·�\��ԇ���C�˙C����Խ�ϵĿ����ԡ�
�����P�I�~�����;�����C����;�\�ӌW����;Խ��
����0 ����
�������ø߉��ͳ��߉��ܿ�ݔ늾�·���L���xݔ��늵���Ҫ��ʽ���������ݔ늾�·�����¹����҇��l�l������Σ��늾W��ȫ�ɿ��\�У���ˣ���ݔ늾�·�M���ճ���Ѳ�z�Լ����Ӛ��l���µij�ѩ������ʮ�ֱ�Ҫ�ġ���������طN�C�����о��I��������о��n�}֮һ��ݔ늾�·�����C�����ڇ�������о���ͣ�������A�Σ���헼��g�о�߀δ�����yһ�Ę˜ʡ����ô������ˮ��о�Ժ���Ƴɹ��� HQ LineRover�b�س���С܇���LJ������熖���ij����C���ˡ�Ŀǰ���Ȍ��ڳ����C���˵��о�߀�]�г���ĮaƷ���F���ѽ��_չ���P�о������ČW�g�C����Ҫ����h��W�����ϴ�W��ɽ�|�Ƽ���W�ȡ�
�����ڽ��b�� �� �� �� �� �C �� �� �� �� �� �� �� �� �A�ϣ����������һ�N���ʽݔ늾�·�����C���ˡ�ԓ�C���ˌ����M�ęC���˼��g�c�������ԭ���ęCе���������ЙC�ں��������Y���Թ��Iĸ�����ƺ��ĵ����ܿ���ϵ�y���܉������ؿ�Խ�߉����� �� �N �� �K���� �F �� �� ݔ � �� · �� �� Ч �� ����ͬ�r��ԓ�C����Ҳ���Ԕy�����P�z�y���ߣ���ɸ߉�ݔ늾�·��Ѳ�z������
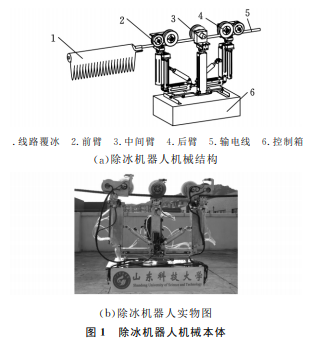
����1 �����C���˙Cе�Y��
����1.1 ���w�OӋ����
��������ݔ늾�·�ĽY�������I�΄յķ� �� �� ��ǰ��ɂ��������ߵ�Ҫ�����C���˲������ی��Q �Y ����ǰ��۽Y����ͬ���� �e �� �� �� � �� �C������������C����������s��әCе�ۺ̈́x܇�ƄәC���M�ɡ����g�ֱ۲��O�����C���������Y���cǰ���ֱ���ͬ[1-2]������ �� �Q �� �b �� �C �w ƽ �_�ϣ�ƽ�_����Ғ��Կ���������؆�Ԫ�������{���b�ã�ԓ�C���˵ęCе�C����D1��ʾ[3]��
�����c�p��ʽ�Y����ȣ�����ʽ�����C�� �� �� Խ���^���У�ͨ�^�{��ǰ�ۺ������{���C�����FԽ���^�������ĵ�ƽ��׃��������Ҫ�M�Џ��s�Ŀ����ˑB���{���������˿��Ƶ��y�ȣ������Խ�ϵĿɿ��ԡ����ǣ�����ʽ�Y�������˙C�������w���|������ˣ������x�É��s�՚��������Դ���Ԛ���ӵķ�ʽʹ���ֱ������s�����ߡ�Խ�ϵȄ����������˂��әC�����OӋ�����pС�˙C�������w���|�����C�������C���|��������50kg���������������c���ٿɌ��F���_�����_��ؓ�d���^ؓ�d���^�����m������;�ڄ���Ѹ�١��ɿ����ɱ��^��;�۹����h���m���Ժã��ɹ����ڐ��ӭh���С�
����1.2 �����C���OӋ
�����������ɰ����ھ�·�ϵı����Լ�����ı���M�ɵģ�����ᘌ��������H������r�����ÙCе���������OӋ��һ�N���ڽ��ٸ������ԭ���ij����C�������������߽M�ɵĽM���и�Ɍ��F��Ч�г��߉�ݔ늾�·���ӵ����IҪ�C���˳������Iʾ��DҊ�D2��
�������P֪�R���]���C�����I����ͨ�ڿ����]http://www.lovetv5.com/lwcommon/31849.html
�����ɽM���������߽M�ɵĸ�����������b�ù����r�����HҪ���F�����ӵĸ�Ч���������ұ�횱��C���ܸ���߉�ݔ늾�·����ˣ��M����������6Ƭ������Ƭ��4���|Ƭ��2�K��������M��[2]������·���ӱ��г���߅���Q�ı��o������ڸ߉�늾��ϣ����F���������cݔ늾�·�ĸ��x���Ķ����Cݔ늾�·�İ�ȫ�����^ԇ�@�N�ͺϳ�����ʽ���Ը�Ч�������ص���������������C��·����á����˺����Y����ʹ���w���Ӿo�����OӋ�Ќ���������C�������߽Y���OӋ��һ��ģ�K�������C�����������b����D3��ʾ��
����2 �����C�����\�ӌW����[4]
����2.1 �C�������\�ӌW��
���������C���˵ęCе�۾���5������ �ȣ��� �����P�������P�������D(���D�Ƕ���θ1 ��θ3 ��ʾ)��ˮƽ��s�ۡ���ֱ��s�ۡ����P������s(��s���x��d2��d4 ��d5 ��ʾ)���Y��ԓ�C���˵ľ��w�Y�������IJ���D-H���M�ЙC�����\�ӌW�ķ��������ȣ������D4��ʾ����ϵ��O0X0Y0Z0 �ǹ̶��ڻ���(�� �� ��)�� �� �� �� ϵ��O1X1Y1Z1 �� �� �P ���� �� ϵ��O2X2Y2Z2 ��ˮƽ��s������ϵ��O3X3Y3Z3 �����P������ϵ��O4X4Y4Z4 �Ǵ�ֱ��s������ϵ��O5X5Y5Z5 �����P������ϵ��
������Σ������D4����������ϵ���г�����������ϵ������D-H ���������B�U�L��ai���B�UŤ�D��αi���B�Uƫ����di ���P���Ƕ�θi��Ҋ��1�����Cе�۸����P��׃����λ�ƻ��߽Ƕ�ֵ��
����3 �����C����Խ��Ҏ��������
���������C���˵�Խ����ͨ�^ģ�����w������·�ϵK�r���ľ�·�·�Խ�ϵĄ������Ќ��F�ġ����IJ��� ADAMSܛ �� �� �C �� �� �� �S ģ �� �M �� ��ģ������ͷ������C���˿�Խ�Ҵ����A�Ą���Ҏ����D6��ʾ��
�����C���������^���У�ǰ���ϵĔz��C �� �� �������������Д��ϵK�����ͺ;��x�����C���������Ҵ����A��^���Ӵ��r���C����ֹͣǰ�M(�D6a)�����ȣ�ǰ�۴�ֱ��s�������������_�ϙC�����_��ʹ�����Ӻͳ����C��Ó����ͬ�r����ƽ��C����������ۺ����g���·�(�D6b)��Ȼ��C�������� �g �� �� �� �� �� �� � �C �� � �� �� �^ �m ���ߣ�ֱ�����g �� �� �� �� �K(�D6c)���� �r ǰ �� �� ֱ��s �� �� ���������_�ϙC���]�ϣ��� �F ǰ �� �� ��(�D6d)���{������ƽ��C������ʼ��B���� �g�ۡ���۵�Խ�Ϸ�ʽ�cǰ�ۻ�����ͬ���������g��������Ó�����C����ǰ������������ϵK�����g���½�����;���������Ó�����C����ǰ�������Խ�^�ϵK������½���������C�������w���Խ��(�D6e)��
��������Y���������C���˿���ͨ�^���P���ąf�{���Խ�ϣ��Ķ���C�˙C����Խ�ϵĿ����ԺͲ��BҎ���ĺ����ԡ�
����4 ��·ԇ���C
������ � �C �� �� �C �� �� Խ �� �� �� �� �ԣ��� ��110kV �˜��о�X�g�����ڌ���ҭh���´ģ�M��·��ԓģ�M��·�������Hݔ늾�·���ϵK��ͣ���Ҵ����A�������N�ȣ��C���ˌ��HԽ��ԇ���D7��ʾ��
����ԇ�Y��������ԓ�C���˘әC��������Խ�Ҵ����A���ϵK�����Ѹ�١��ɿ�����C�˘әC�OӋ�����_�ԡ�
����5 �Y�Z
����������� �� һ �N �� �� ʽ ݔ � �� · �� �� �C ���ˣ�����D-H �����C�����M���\�ӌW����������ADAMS�h �� �� �� �C �� �� Խ �� �^ �� �M �� ģ �M ���棬����Y���;�·�\��ԇ���C�˘әC�OӋ�Ŀ����ԣ���C���˵Ĺ��̑����ṩ��һ�����������S���C���˸��N���ܵIJ������ƺ��˂���ݔ늾�·�ɿ��Ե�Ҫ��Խ��Խ�ߣ���lչǰ�����Ƿdz��V韵ġ�——Փ�����ߣ������1 �B����1��2