�l���r�g�����ٷ���@�ֹ��̎��g�[��1��
ժ Ҫ�� ժҪ��ǰ����ͬ���g�ֱ����l��Ӱ��ɭ������R�e�Y�����ձ���ڵij߶�Ч�������Ҽy�텢������ͬ�߶���N�R�e���ȵ�Ӱ���ȱ���V���J֪.���о����Ї��|�����I���ֈ����о��^�������^�y�r��ͬ������������ƥ���GF-1PMS��GF-2PMS��GF-1WFV���Լ�Landsat-8OL
����ժҪ��ǰ����ͬ���g�ֱ����l��Ӱ��ɭ������R�e�Y�����ձ���ڵij߶�Ч�������Ҽy�텢������ͬ�߶���N�R�e���ȵ�Ӱ���ȱ���V���J֪.���о����Ї��|�����I���ֈ����о��^�������^�y�r��ͬ������������ƥ���GF-1PMS��GF-2PMS��GF-1WFV���Լ�Landsat-8OLI�l�ǂ����������M�ɿ��g�߶��^�y����(1��2��4��8��16��30m)�����Y��֧�������C(SVM)ģ�ͣ�̽ӑ�˅^���5�N���ݘ�N�b���R�e�Y���ij߶�׃��Ҏ�ɼ���y������������Ӱ푣�ͬ�r�z��˻��ڳ߶������D�QӰ��Ę�N�R�e�Y���.�Y������:Ӱ����g�ֱ��ʌ��^���N�R�e�Y�������@��Ӱ푣����У��о��^ɭ�֘�N�R�e�����Ӱ��ֱ��ʞ�4m�����ֱ��ʽ�����30m�r����N�R�e�Y�����.��1��8mӰ��ֱ��ʷ����ȣ����Ӽy����Ϣ�܉��@����߲�ͬ���ݘ�N���R�e���ȣ�ʹ�������������2.0%��3.6%�����y����Ϣ��16��30mӰ����R�e�Y���]���@��Ӱ�.�c�挍�߶��l��Ӱ����ȣ��������߶��D�QӰ��Ę�N�R�e�Y������߶�푑����������@���������������������g�߶ȵ��b���^�y�͑����о��У���Ҫ�����挍�ֱ���Ӱ���Դ_���Y���Ĝʴ_��.
�����P�I�~��N�R�e;���g�ֱ���;����V�b��;�y����Ϣ;�߶�Ч��
����ɭ��ֲ����ȫ��ꑵ����Bϵ�y����Ҫ�M�ɲ��֣����ر�̼ѭ�h�Լ�����ƽ�������Ҫ����[1].�ʴ_�@ȡɭ�֘�N����ͺͿ��g�ֲ���Ϣ�����H�DZ��ϵ^ɭ����e�����gλ�ÄӑB��ɭ�ֽ��I�ͱO�yָ�˾��ȵ���Ҫǰ�ᣬ߀ֱ��Ӱ푵��ַ���e��������������N�����Ժ����Bϵ�y���չ��ܵ����Pģ�ͽY���Ĝʴ_��[2-4].��20������b�м��g����uȡ���˹��ղ飬�ɞ��֘I���T�����P�W�߫@ȡɭ�������Ϣ����Ҫ����.���������^�y��N�ڌӳߴ��Լ�Ӱ����g�ֱ��ʵ����ƣ��^�Ϳ��g�ֱ��ʵ��b��Ӱ��ɭ�֘�N��͵��R�e�������y[5-6].�෴���и߷ֱ����b��Ӱ��(1��30m)���^�yҕ���ӽ��ژ�N���ַֹڌӳߴ磬�܉���Ч��������Ԫ�����_ֲ���ļ���׃��[7]��ͬ�r���l��Ӱ���ܾ߂��^��Ŀ��g���w���������څ^��ɭ�֘�N�����R�e�߂��^����[2].
�����о��������b��Ӱ����g�ֱ��ʵ�׃�����������ڱ��_������Ϣ�͔��������r�a������Ķ�ʹ���P�Y���a���߶�Ч��[8-9].�L���ԁ�������ͬ����߶��^�yӰ����ȱ����ᘌ��b�И�N�R�e�Ŀ��g�߶�Ч���Լ�����R�e�߶��ж��Ȇ��}һֱδ�ܵõ���Ч��Q[10].���ه�����W����Ӱ���زɘӺ����ɵĶ�߶Ȕ���������ͬ�^ɭ��[11-13]���N[14-17]����R�e�Ŀ��g�߶�Ч���_չ�����P�о�.��Meddens��[15]��0.3m�ֱ���Ӱ���زɘ���1.2��2.4��4.2m���Y���l�F2.4mӰ����R�e�������.Ghosh��[16]����4��8��30m��3�N���g�ֱ���Ӱ��N�R�e�Y���M���˳߶�Ч���������Y��������8m�ֱ���Ӱ����R�eЧ�����.�����о��ɹ���̽ӑӰ����g�ֱ��ʌ���N�R�e���ȵ�Ӱ��ṩ�˲��օ�����������Ӱ������߶��D�Q�^�̕����½Y��Ӱ����Ԫ���Vʧ��[18-19]�������cͬ�߶��挍�^�yӰ���ɭ�֘�N�R�e�Y���߀�д���C.
�������⣬�S���l��Ӱ����g�ֱ��ʵIJ�����ߣ��y��������ֲ���b�з���еĝ��ڃrֵ��u�ܵ���ҕ[20]����ᘌ��y����������ͬ���g�ֱ���Ӱ��Ę�N�R�e�Y����Ȇ��}��ؽ����Q.���ڴˣ����о����Ї��|���^�����I���ֈ����о��^���Y�ϴ���Ұ�⌍�y���c��ͬ�������D���o������������ͬ�r���6���B�m���g�߶��l��Ӱ��(1��2��4��8��16��30m)���о��^5�N������N����M���R�e��������N�R�e�Y���Ŀ��g�߶Ȳ��׃��Ҏ�ɣ��������ڳ߶����ƵIJ�ͬ���g�ֱ���Ӱ��Y���M�Ќ�����C;ͬ�r��̽ӑ���ڲ�ͬ���g�ֱ����£��y��������������ͬ��N����ȵ�Ӱ푣����ڞ��߶��b��Ӱ����ɭ���YԴ�R�e�̈́ӑB�O�y�����ṩ����������.
����1��^�c�����
����1.1�о��^�śr
�������I���ֈ�λ���Ї����ɹ����΅^��������ϲ�(41°21'—41°39'N��118°09'—118°31'E)��������e��551km2�����а������ֵ���e�s463km2(�D1).�о��^�ٜ؎����L�����ƽ�����4.2�棬�꽵ˮ��400��600mm�������Օr������2700h.������ɽ�؞�����������800��1890m.���ص�ɭ��ֲ��������˹��֞������ַָ��w�����^��.���͆�ľ��N��Ҫ������(Pinustabuliformis)�����~��(Larixgmelinii)��ɽ��(Populusdavidiana)���ט�(Betulaplatyphylla)���ɹř�(Quercusmongolica)����N��eռ�о��^ɭ�ֿ���e95%����[21].���о�������5�N�������ݘ�N�����о��������У����ɺ����~�ɷքe���ڳ��G��~��N�����~��~��N����ɽ��ט���ɹř��������~��~��N.
����1.2������Դ
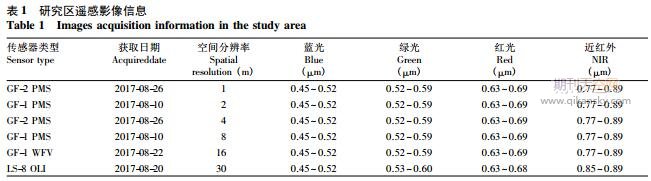
����1.2.1�b�Д������о��b�Д�����GF-1PMS��GF-2PMS��GF-1WFV��Landsat-8OLI��6���и߷ֱ���Ӱ�քeԴ���Ї��YԴ�l�Ǒ�������(CCRSDA)�Լ��������|��̽��(USGS)�Wվ(��1).����Ӱ���x��˜ʞ�����|���á��o������ͬ�r����Ӱ����V�ڵ���r���ϵ�һ���ԣ�������ֲ��������ɵĹ��V׃��[22].���⣬�ļ�ֲ�����L��ʢ�����C���Dz��Æμ����b�Д����M�И�N�R�e����ѕr��[23].
�������P֪�R���]��������B�����Փ�Ŀ���Ͷ����Щ�ڿ�
����������h����׃���У��o���ص��r�I���BҲ�����Ӱ푣��ܶ����B�ĘI�ˆTҲ�_ʼ�о����B���P��Փ�ģ�Ȼ���@�����Փ�Ŀ���Ͷ�嵽��Щ������?�@Ҳ�Ǻܶ�������ԃС���Ć��}������С��ͨ�^��������r�I���B�ڿ������죬�o��ҷ����ˎױ����^��Ͷ���������B���
�����߷�һ̖(GF-1)�l�Ǵ��d�˃��_2m�ֱ���ȫɫ��8m�ֱ��ʶ���V���C(PMS)�������{�⡢�G�⡢�t�⡢���t��4������.GF-1ͬ�r���d4�_16m�ֱ��ʶ���V���C(WFV)�������O���cPMSһ��.�߷ֶ�̖(GF-2)�l�Ǵ��d��2�_�߷ֱ���1mȫɫ��4m����V���C(PMS)���������O���cGF-1��ͬ�������g�ֱ������1��.Landsat-8OLI���������O��9�����Σ���̎�H���������{�⡢�G�⡢�t��ͽ��t��4������.
����1.2.2Ұ���^�y����2017��9�����о��^�_չ�˞���8d��Ұ���N�{��ԇ��ɢӛ���Ҫ��ľ���ݘ�N���ɡ����~�ɡ�ɽ��ט���ɹř����ַ֘Ӆ^�Ŀ��gλ�ã��C�Ͽ��]���g�Y���������w�Ⱥ��ַ��ܶȲ�����M��ÿ���^�y�Ӆ^�Ŀ��g�ߴ粻С��30m×30m.�����ֳ�GPS��һӛ����x�ַ֘Ӆ^����λ�õĿ��g�������ˣ�ͬ�r�Ԙ˜�ľ���y���ӵ�ƽ���ڷ���ԇ�@ȡ�о��^5�N���͘�N��͵ĵ��͘Ӆ^��1156��.�鱣�CӰ����c��Ԫ�Ĺ��V���ȣ��Ը��Ӆ^�������c�鼃�ӱ��O��ԇ�Ӗ���ӱ�����C�ӱ�.���У����x����N�ӱ����������s1/3����Ӗ����ʣ���ӱ�������C[24].��ͬ��N�ӱ���ϢҊ��2.���⣬ͬ��ӛ䛵�������c30���������b��Ӱ��Ŀ��g����c�ξ�У��.
����1.3Ӱ���A̎��
��������Gram-Schmidt׃�Q��GF-1��GF-2ȫɫ�����c����V�����ںϣ��քe����1m��2m�ֱ��ʶ���VӰ��.�о�������Gram-Schmidt�㷨���H�����˿��g������Ϣ�������^�õر���ԭʼӰ��Ĺ��V��Ϣ[25].����Ӱ���Ԏ���RPC�ļ����о��^���ָ߳�ģ��(DEM��30m)�Լ�����GPSӛ䛵Ŀ����c���l��Ӱ���M������У���͎ξ�У��.ͬ�r����m����VӰ�����ʣ�������Ӱ�������M��������У����ʹ�������`��(RMSE)С��0.5����Ԫ.�����Ї��YԴ�l�ǔ����c��������(CRESDA)���������|�{���(USGS)�ٷ��Wվ�l����ͬ�ڶ��˅�����������ʽ��Ӱ���M��ݗ��У��.
����Le(λe)=Gain·DN+Offset(1)ʽ��:Le(λe)�������̎�Ĺ��Vݗ������(W·m-2·sr-1·μm-1);Gain��У������ϵ��;DN����Ԫ�Ҷ�ֵ;Offset��У��ƫ����(W·m-2·sr-1·μm-1)
����.���û���Ӱ��Ĺ��պʹ������ģ��(IACM)[26]�c�β�׃����ģ��(PIF)[27]�M�д��У����������Ӱ���DNֵ�D�Q�ɵر��挍������.�о�������ԓ�㷨�܉���Ч�˷�������֮�g������У���`��[28].���⣬���ÏV��ʹ�õ���Ԫ�ۺ�(PA)���߶��D�Q����[13]��1m�b�Д����քe�زɘ���2��4��8��16��30m.
����1.4�y����Ϣ��ȡ
�������ڻҶȹ������(graylevelco-occurrencematrices��GLCM)��ȡ��ͬ�߶�Ӱ��Ę�N�y������.GLCM�܉��^�õ�����Ӱ��Ҷ�ֵ�Ŀ��g�Pϵ�ͽY�����������w�F�D��y���yӋҎ�����c[29].��������VӰ���M�����ɷַ���(principalcomponentanalysis��PCA)׃�Q�����x���һ������(��95%����Ӱ����Ϣ��)����Ӌ���4�N�y�텢�����������ȶ�(contrast)����Ϣ��(entropy)�����A��(secondmoment)�����P��(correlation)�����ڳߴ��3×3.�о����������x�y�텢���܉��^���w�Fɭ��ֲ���ڌӵļy������[30].
����1.5����c��C
��������֧�������C(SVM)�����ں�Ӱ����V�ͼy����Ϣ�ķ���������о��߶�׃���������ɭ������R�e�Y���.SVM�������һ�N��Դ�ڽyӋ�W����Փ�ķDž����O������㷨����o����O�ƶ���ݔ�딵�������B�ֲ�������Ӗ������ӳ�䵽�߾S���g���Ķ��ھ��ԭʼ�����Ķ�S������[31].���P�о�������SVM�ĵ����R�eЧ�ʃ��������Ȼ����㷨[32-33]���Լ��W�j��Q�ߘ���ģ��[34-35].���⣬�����о��^�����D��������ȡ��ɭ��߅�磬���Mһ��������5�N�������ݘ�N����M�о����R�e.
������Ӱ��ԭʼ�����⣬���Ӛwһ��ֲ��ָ��(NDVI)�������G��ָ��(RGI)�����a�������������cSVM������\��[15]�����Դ������һ�M���ԇ�.�ڶ��Mԇ�t�ڵ�һ�Mԇ���A�ϼ������x��4�N�y��׃�������Mһ�������y����������N�R�e��Ӱ�.���Ñ��Pϵ��C=100.0���˺����돽σ=1.000�r�ď�����˺����M��SVM�㷨[30].
����NDVI=(NIR-Red)/(NIR+Red)(2)
����RGI=Red/Green(3)
����ʽ��:NIR��Red��Green�քe����Ӱ��Ľ��t�⡢�t��;G�Ⲩ�εĵر�������.
����������C�xȡ���ڻ�����ꇵ�4�ָ�ˣ������������(overallaccuracy��OA)��Kappaϵ�����ƈD����(producer’saccuracy��PA)���Ñ�����(user’saccuracy��UA)[36].ͬ�r������C�ӱ���ȡ�S�C���Żصķ�ʽ����Y���M��5���؏�Ӌ�㣬ʹ���з�Y�����a��һ�M���Ⱥ�Kappa��ֵ.���÷������(ANOVA)���yӋ�Y���M�Йz���x����С�@���Բ��(LSD)�Єe��@����(α=0.05)[37].
����2�Y���c����
����2.1���g�ֱ���׃���c��N��Y��
�����ɈD2���Կ������о��^��ͬ���ݘ�N�Ŀ�����Ⱥ�Kappaϵ�������SӰ����g�ֱ��ʵ����ӳ������ߺ͵�څ�ݣ����ߔ�ֵ��1m��4m�ֱ�����u���������_�����(81.1%±1.0%��0.759±0.014);����4m��30m�ֱ��ʳ��m�½�������30m�ֱ���̎�քe����70%��0.62.���������������ͬ���g�ֱ���Ӱ�^���N��Y����Ӱ푴����@���.���У�6�N�ֱ���Ӱ��ķ���Ⱥ�Kappaϵ���ɸߵ������Ξ�4m>2m>8m>16m>1m>30m��4m�ֱ���Ӱ��ķ�������@�����������g�ֱ���Ӱ��2��16m�ֱ��ʵ�Ӱ��Y���t�քe�c8m�ֱ���Ӱ��]���@�����ͬ�r1�c30m�ֱ���Ӱ��ĽY������Ҳ�^��ӽ�.
��������4m�ֱ���Ӱ��@ȡ���о��^5�N���ݘ�N�ķֲ��D(�D3).���У����ֵ������Ҫ���������õء����ء�������ľ����Ҫ�ֲ����о��^����ƽ̹�����������ܼ��ą^�ʎ���ֲ�;ɭ����Ҫ�ֲ���Ӱ����ą^�����������ɽ�������������Ƭ��ֲ�.���У����ɺ����~�ɵķֲ��������У���Ҫ�ֲ����о��^�в��Լ��������^;�ט���Ҫ�ֲ����о��^�������ϲ������ɽ�¼�ɽ��̎���γ�һ����e�ļ���;ɽ����ɹř���Ҫ�ֲ���Ӱ��������ܣ����c�ט�������;�����ɹř��ֲ��������V��ͬ�r�߉K��������.
����2.2�������߶��D�QӰ��ķ�Y��
��������1m�ֱ���Ӱ�������M�в�ͬ���������߶��D�Q�������挍�߶�Ӱ���c�زɘ�Ӱ���ڲ�ͬ���g�ֱ����µķ�Y���M�з���������䌦�ӱ�T�z�(Paired-samplesT).�Y������(��3)�����ڳ߶�����Ӱ��ķ�������w�ϰ��S���g�ֱ��ʵĽ��Ͷ���u���.���У���1��8m�ֱ��ʷ����ȣ����߶ȈD4��ͬ�߶�����Ӱ���cͬ�߶��挍Ӱ���в�ͬ���ݘ�N�R�e�Y���Ŀ��gһ�¶ȱ��^Fig.4Spatialagreementofdifferentdominanttreespeciesclassificationsbetweennative-imageandaggregated-imageatdifferentresolution(%).����Ӱ��Y��֮�g�������@���������16��30m�ֱ��ʷ����ȟo���@��������о��^��N�R�e���ȵ�׃�����Ȱ��SӰ��ֱ��ʽ��Ͷ��½�����Ӱ��ֱ��ʵ���8m���½�څ�����@��ͬ�r��16��30m�ֱ��ʷ����ȟo���@׃��.���w�Ͽ������ڳ߶�����Ӱ��ķ�Y�����ȷ�����(72.9%±1.1%)��(83.8%±1.2%)���Ը����挍Ӱ��ĽY�����ȷ���(69.6%±1.0%)��(81.1%±1.0%).Ȼ��������Paired-samplesT�z�Y�������ڳ߶�����Ӱ��ĸ��ֱ���Ӱ��Y���c�挍Ӱ��Y���������@���.���У��߶�����Ӱ����1��4m�ֱ���̎�@�������挍�ֱ���Ӱ��Y��������8��30m�ֱ��ʵĽY�����Ȅt�@�������挍�ֱ���Ӱ��.
�����D4�@ʾ��ͬ�߶��挍Ӱ������߶��D�QӰ���ڲ�ͬ�ֱ�����N�������(OA)�c��ͬ��N��ͷֲ��Ŀ��gһ�¶�ˮƽ(���ò�ͬӰ��ͬ������Ԫ�M����һ���ȣ���ӛ䛷�Y��һ�µ���Ԫ����).�Y���������S�����g�ֱ��ʵĽ��ͣ��挍Ӱ����زɘ�Ӱ���Y�������w���gһ�¶����@�½�.���У�������ߵĿ��gһ���Գ��F��4m�ֱ��ʣ��_��68.2%.ɽ����~�ɡ��ט���ɹř�����4m�ֱ����_����ѿ��gһ���ԣ����ט�͗���������߶����ЃȵĿ��gһ�¶������^��.