�l(f��)���r(sh��)�g�����ٷ��(l��i)��Ӌ(j��)��C(j��)�Q(ch��ng)Փ���g�[��1��
ժ Ҫ�� ժ Ҫ������������L(zh��ng)����֡����Д�(sh��)��������(sh��)���Ԡ����Ƽs���a(ch��n)������Ҫ�M���ԠĿǰ��Ҫ�����˹��y(c��)����ʽ����ͨ�^(gu��)��ȡ����M����D���Ԅ�(d��ng)Ӌ(j��)�����Д�(sh��)�ȅ���(sh��)��������(f��)�s���y(c��)��Ч�ʵ͡����^�`����ҟo(w��)������������ԭʼ���N���ϡ�ᘌ�(du��)������(w��n)�}��ԓ�Ļ��ڙC(j��)��ҕ�X(ju��)���g(sh��)
����ժ Ҫ������������L(zh��ng)����֡����Д�(sh��)��������(sh��)���Ԡ����Ƽs���a(ch��n)������Ҫ�M���ԠĿǰ��Ҫ�����˹��y(c��)����ʽ����ͨ�^(gu��)��ȡ����M����D���Ԅ�(d��ng)Ӌ(j��)�����Д�(sh��)�ȅ���(sh��)��������(f��)�s���y(c��)��Ч�ʵ͡����^�`����ҟo(w��)������������ԭʼ���N���ϡ�ᘌ�(du��)������(w��n)�}��ԓ�Ļ��ڙC(j��)��ҕ�X(ju��)���g(sh��)��ͨ�^(gu��)��Ҋ(ji��n)����S����@ȡ�������S�����Ԡ��(sh��)���Y(ji��)�Ϲ����ɫ���������������W(xu��)Ҏ(gu��)�ɣ��քe����ͶӰ����ģ�͡����Д�(sh��)���ٹ���ģ�͡�������(sh��)Ӌ(j��)��ģ�͵ȣ����_Ӌ(j��)�����L(zh��ng)����֡����Д�(sh��)�Լ�������(sh��)���Ԡ��(sh��)��ԇ�(y��n)�Y(ji��)��������ԓ�����m����ճ�B����̎�����d����R(sh��)�e�ʸߣ��Ҍ�(du��)���խh(hu��n)��Ҫ��ͣ����Д�(sh��)��������(sh��)�����`������ 93%���ϣ��y(c��)���ٶȿ��_(d��) 30 ��/min ���ϣ��܉�M���ͨ�����N�������e�DZ�����ԭʼ���뿼�N���ό�(sh��)�F(xi��n)�o(w��)�p�y(c��)������(du��)�ڌ�(sh��)�F(xi��n)��ͨ�����N������(x��)�����N����Ҫ�ą����r(ji��)ֵ��
�����P(gu��n)�I�~���C(j��)��ҕ�X(ju��);�D��̎��;�o(w��)�p�z�y(c��);����;�N��;���Д�(sh��);������(sh��)
����0 �� ��
�������N�����������z�����N�^(gu��)����һ��(g��)��Ҫ�ĭh(hu��n)��(ji��)�����N���(xi��ng)Ŀ���N�(l��i)�������漰��ͬ��Ʒ�N���a(ch��n)�������������Ԡ(sh��)��(j��)���@Щ�Ԡ(sh��)��(j��)��Ҫ�ռ���������ӛ䛡��y(t��ng)Ӌ(j��)���������惦(ch��)[1]����ο��ٜ�(zh��n)�_�y(c��)�������N�Ԡ(sh��)��(j��)����(du��)����߿ƌW(xu��)�x�N�����NЧ�ʘO����Ҫ��
����Ŀǰ��(gu��)��(n��i)�о�����������o(w��)�p�y(c��)���������^�٣��������[2]����ȫ�����g(sh��)���ɼ������D(zhu��n)������D�����Пo(w��)�pƴ�ӣ���(du��)����ȫ���D���M(j��n)�п��Nָ��(bi��o)�z�y(c��)��������z�y(c��)�r(sh��)�g�s 30 s�������r(n��ng)�I(y��)�����b�似�g(sh��)�о����ĵĮ�����[4]�о��˻��ڙC(j��)��ҕ�X(ju��)�������N�b�ã�ͨ�^(gu��)�D��ɼ��b���Լ��d���_(t��i)�y(c��)���b����ȡ���������(g��)���N����(sh��)��������Ŀǰ�˹����N�ı����;���ڌ�(sh��)�F(xi��n)��(sh��)���ӱ����N�y(c��)��������һ���ľ����ԡ���������[5]�t�����һ�N���ڱ���������ߵ�������D�������y(c��)��������������(ji��n)�������������y(c��)�����������㷨�](m��i)�п��]�����C(j��)��������c(di��n)��ɵĈD��Ŵ����ؾ��x�ֲ��ķǾ������ԣ������L(zh��ng)��֜y(c��)���y(c��)���� 96.01%����(������ 97%����)���ҿɜy(c��)�����Ԡ��^�١�
�����Ա������f����x���������N���؞������������IJ�����ÿ������ 15 ��(g��)ԇ�(y��n)�c(di��n)��ÿ��(g��)ԇ�(y��n)�c(di��n)�迼�� 5 000 ����(g��)Ʒ�N(�Խ�ϵ���s��ϵ)�����N�^(gu��)�̾����˹���ɣ���������(w��n)�}�������ɱ����Ĵ���Ч�ʵ͡����Ȳ��ߡ����^�^�y(c��)�`�����Ϣ�����ʵ͵Ȇ�(w��n)�}������о���������Ԅ�(d��ng)�o(w��)�p���N����������Ҫ���x��
�����F(xi��n)�A�������N��Ҫ�֞��������g�y(c��)�a(ch��n)���҃�(n��i)���N 2 ���֣����Įa(ch��n)������Ʒ�N�������l�����a(ch��n)��ˮƽ����Ȼ���ͬ���a(ch��n)�����صĘ�(g��u)��Ҳ�кܴ�����ˣ�ͨ�^(gu��)�҃�(n��i)���N�������о��ڲ�ͬ�l���µĺ����a(ch��n)���Y(ji��)��(g��u)����(zh��ng)ȡ����������ص�Ʒ�N�Ɍ�(sh��)�F(xi��n)�M(j��n)һ�����M(j��n)�߮a(ch��n)��
�����C�������������о���һ�N���ڙC(j��)��ҕ�X(ju��)��������a(ch��n)���M���Ԡ���ٟo(w��)�p�y(c��)���������ڱ��C�y(c��)�����ȵ�ͬ�r(sh��)��������Ӳ���O(sh��)��ɱ����Ҝy(c��)���ٶȿ��_(d��)ÿ��� 30 �����ϣ���ȫ�܉�M�㿼�N������(du��)�ڌ�(sh��)�F(xi��n)��ͨ�����N������(x��)�����N����Ҫ���x������������������D��ɼ���ճ�B����݆����ȡ��ͶӰ����ģ�͡����Д�(sh��)���ٹ���ģ�͡�������(sh��)���ٹ���ģ�͵ȭh(hu��n)��(ji��)��
����1 ������D��ɼ�
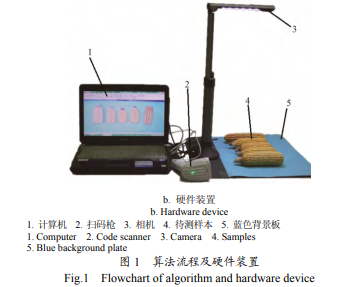
�����鱣�C�㷨�������õ��m��(y��ng)�ԣ�ģ�M�����N�Č�(sh��)�H�����h(hu��n)�����O(sh��)�ÈD��ɼ���ԇ�(y��n)�h(hu��n)�����£��ǏV�� CMOS ᘿ����C(j��)(��y���ͳɱ�)���⾀��͵�������(ch��ng)���²ɼ�(�o(w��)�������Դ�O(sh��)��)�����C(j��)�� 500 �f(w��n)���أ��D��ֱ��ʞ� 2942 ����(pixel)×1944 ����(pixel)���Ĕz�߶Ȟ� 55 cm���Ĕz����� A3 ���档���㷨�y(c��)ԇʹ�õ� PC �C(j��)���Þ��p�� 1.9 GHz��2 G ��(n��i)�档�D��ɼ��^(q��)���{(l��n)ɫ�ı����壬�����Ʒ������[���ÈD��ɼ��^(q��)���㷨��̎������ճ�B�[������r���㷨���̼����wӲ���b����D 1 ��ʾ��
����2 ճ�B����݆����ȡ
����2.1 ����݆����ȡ
����������݆����ȡ�ľ��Ⱥ��ٶ�ֱ��Ӱ푺��m(x��)���S�����Ԡ��Ӌ(j��)�㣬���P(gu��n)�I�ĭh(hu��n)��(ji��)���Y(ji��)�������N�Č�(sh��)�HӲ�����խh(hu��n)����r��݆����ȡ��Ҫ��Q�Ӱ�ĸɔ_�����C(j��)�Ԅ�(d��ng)��ƽ����Ԅ�(d��ng)�ع�ɫ��Ȇ�(w��n)�}��
�������ڹ���D���������(w��n)�}�����y(t��ng)��ɫ��ͨ�����x�㷨���ھ����ԣ��o(w��)����(zh��n)�_��ȡ����݆��;���IJɼ����҃�(n��i)�谵�l���¡��҃�(n��i)�����l���¡������Ӱ�l���¡����⏊(qi��ng)��l���µȭh(hu��n)���µĶ������D���Դ˞�ӱ���(sh��)��(j��)��Ӌ(j��)�����ͱ���֮�g���(l��i)�g������Դ��������݆���ָ������(j��)����D 2 ��ʾ�����Ӱ��ɫ���(y��n)����r�£�����݆�����Ԝ�(zh��n)�_��ȡ����(l��i)��
����2.2 ճ�B����݆���ָ�
�����������������y(c��)��ͨ�����ٶȣ��[�Ź��뵽�Ĕzƽ�_(t��i)�r(sh��)���S����[�š�����ճ�B��r���P(gu��n)��ճ�BĿ��(bi��o)���x��(w��n)�}�кܶཛ(j��ng)���㷨�������M(j��n)���ˌ�(du��)�ȷ��������£�
�����O���g�����ָ�����ٶ��������Ɖ���݆����
�����]�������ԓ�㷨Ҫ��Ŀ��(bi��o)݆�������ԡ�������݆�����M�㡣
������ˮ�X�㷨��������^(gu��)�ָ
��������A��Ӌ(j��)����ֻ�ָܷ��(l��i)�A��Ŀ��(bi��o)�������벻�M�㡣
�����b��������r�����������һ�N���M(j��n)��������ճ�B(�Q�Ŕ[���Ҵ�(li��n)ճ�B��r)�ָ��㷨�����w�㷨���£�
����S1���xȡ�����(c��)����݆���������c(di��n)������ʼ�c(di��n)������ freeman 朴a��݆ۙ���ݶ�׃��������(bi��o)ӛ�P(gu��n)�I�c(di��n)���ݶ�Ӌ(j��)����ò�ַ�������ٶ�;
����S2��݆����ۙ��(hu��)�a(ch��n)�������c(di��n)�������c(di��n)���(l��i)�����ڷָ��c(di��n)���������c(di��n)�����ֻ��(bi��o)ӛ�����c(di��n);
����S3��ᘌ�(du��)���F(xi��n)�IJ����^(gu��)�ָ�F(xi��n)����Ҫ����(j��)�ָ��c(di��n)���^(gu��)�ָ��c(di��n)֮�g������ȥ���^(gu��)�ָ��c(di��n)�����������Ȼ��Ӌ(j��)���õ���С�������x�ϵķָ��c(di��n)λ��;
����S4������ĵײ��ָ��픲��ָ���(l��i)�ƣ�ֻ��Ҫ���Q�����c(di��n)�������c(di��n)�����Դ������M(j��n)�������Ȼ��Ӌ(j��)�Գ�ȥ�^(gu��)�ָ��c(di��n);
����S5�����Ռ�(du��)��(y��ng)�c(di��n)�P(gu��n)ϵ(�����c(di��n)��(du��)��(y��ng)�����c(di��n))�����_(k��i)ճ�B݆��������(g��)ճ�B����ķָ�Ч����D 3 ��ʾ��
����3 ͶӰ����ģ��
�����������������(l��i)���D(zhu��n)�w������(j��)���C(j��)����ԭ������(g��u)���������ֵȅ���(sh��)��ͶӰУ��ģ�ͣ���D 4 ��ʾ��
�����D 4 �� D �c(di��n)�����C(j��)λ�ã�C �c(di��n)��ɼ��D������λ�ã��A�δ�������݆�����gλ�õĽ���(���N�{(di��o)������ֱ����x����� 1/2 λ�õĴֶ�)������ֱ����ʾ������Č�(sh��)�H��֡�DB �� DA ��ʾͶӰ�⾀��AB ���������L(zh��ng)�Ⱦ��Dzɼ����D���ϵ����(�f(shu��)�����D���Ϝy(c��)���L(zh��ng)�Ȟ齛(j��ng)�^(gu��)��(bi��o)����(d��ng)��׃�Q�Č�(sh��)�H�L(zh��ng)��ֵ)����ˣ�������Č�(sh��)�H��֞� ΔADB �ă�(n��i)�ЈAֱ����
����4 ���Д�(sh��)���ٹ���ģ��
����4.1 ����˼��
��������������Д�(sh��)������������W(xu��)����������С��ֻ���С����Ƭ��(hu��)���ў� 2 ��(g��)С���M(j��n)���ֻ��� 2 ��(g��)С��ͻ��ʹ�����L(zh��ng)���p�У��������������Д�(sh��)��ż��(sh��)���ҽ^�����(sh��)Ʒ�N���������Д�(sh��)�ķ����� 10 �е� 22 ��֮�g������������� 5 �У�����һ����Ҏ(gu��)���ԡ������������Д�(sh��)������W(xu��)����������ͨ�^(gu��)����ɼ�����D���(l��i)��(g��u)�����Д�(sh��)���ٹ���ģ�͡�
�������˹����N�y(c��)���У����ڹ���߅������݆���������������ҹ���������� 5 �У����Д�(sh��)һ����ͨ�^(gu��)Ӌ(j��)��������������������̶ܳȁ�(l��i)�Єe��;��˱����㷨ͨ�^(gu��)����D���������е��������̶ܳȁ�(l��i)Ӌ(j��)�����Д�(sh��)��ͨ�^(gu��)��(du��)�ȷ��� G ɫ��ͨ�����x��B ɫ��ͨ�����x��H ͨ�����x��S ͨ�����x�����tɫ��������ȡ(2R-G-B ��N�������㷨���� G ͨ�����x���Թ���݆������ ROI ��(zh��)�� OTSU �㷨���Ķ���(sh��)�F(xi��n)�����ķָͻ�������c�p϶�g�Ҷ�ֵ��
�������˱����������Д�(sh��)���ٹ���ģ�ͣ���D 5 ��ʾ�����x�����g(sh��)�Z(y��)��
������������(center grain point)������̎�ڟo(w��)�d�����?y��n)^(q��)��������λ�õ�������
������λ�c(di��n)(left location point)��������һ�к�����еķָ��c(di��n)����λ�c(di��n)����λ�c(di��n)�_���������е�λ�á�
������λ�c(di��n)(right location point)��������һ�к��Ҷ��еķָ��c(di��n)����λ�c(di��n)����λ�c(di��n)�_���������е�λ�á�
��������c(di��n)(left end point)��������߅�����е�߅�磬һ���ڹ�����ȡ���(n��i)����
�����ҽ��c(di��n)(right end point)��������߅�����е�߅�磬һ���ڹ�����ȡ���(n��i)����
�������У���λ�c(di��n)����λ�c(di��n)�����������е�λ�ã��@ 2 �c(di��n)֮�g���������Д�(sh��)�� 3��
����4.2 λ�c(di��n)��λ���c(di��n)Ӌ(j��)��
���������������跨�ڒ��������������Еr(sh��)���ɫ@ȡ�@���еĿp϶���ȣ�ȡ���ȵ���������(bi��o)�������������е���λ�c(di��n);ͬ������Ӌ(j��)��õ������е���λ�c(di��n)��
��������c(di��n)Ӌ(j��)�㷽�����£�
����S1���@ȡģ��D������D(zhu��n)�D��;
����S2�������������������c(di��n)�_(k��i)ʼ�����D(zhu��n)���ģ��D����������裬ֱ�������Ҷ�ֵ�� 0 ���c(di��n)(��ɫ�����c(di��n))��ֹ;
����S3��ԓ�c(di��n)��ǰһ��(g��)�c(di��n)��������c(di��n)��
�����ҽ��c(di��n)�㷨�c֮�(l��i)�ƣ��ڴ˲���٘�����ګ@ȡ������Ҫ���c(di��n)����(bi��o)����Ҫ�M(j��n)�������D(zhu��n)׃�Q�������D(zhu��n)��Ӌ(j��)��õ����c(di��n)���D(zhu��n)��ԭ�D������(bi��o)ϵ��(d��ng)�С���K����(du��)�����������������R(sh��)�eЧ����D 6 ��ʾ��
�����ĈD 6 �� 2 ��(g��)����ָ�Y(ji��)�����Կ�������(du��)���Ų��o�ܵĹ����������Ų���ɢ��������ԓ�㷨�����R(sh��)�e�������е�λ����Ϣ��
�����_������λ�c(di��n)����λ�c(di��n)������c(di��n)���ҽ��c(di��n)�@ 4 ��(g��)�P(gu��n)�I�c(di��n)��Ϣ����Ӌ(j��)������Д�(sh��)��
����4.3 λ���c(di��n)���Д�(sh��)Ӌ(j��)��ģ��
�������Д�(sh��)Ӌ(j��)��ģ�Ͳ���ƽ��ͶӰ�M(j��n)��Ӌ(j��)��(��D 7 ��ʾ 2 �l��ֱ�Q��)�������Ĕz�߶��h(yu��n)������֣����ͶӰ���Aб��ɵ��`��ɺ��Բ�Ӌ(j��)��
�����ڈD 7 �У�����(g��)�A��������ęM���棬���� GH �����Ĝy(c��)������(zh��n)ƽ�棬GH ���L(zh��ng)�ȱ�ʾ����L(zh��ng)��;MN ��ʾ�����е�ͶӰ�L(zh��ng)�ȣ�GM �� NH �քe��ʾ�����Ѓɂ�(c��)��Ҋ(ji��n)������ͶӰ�L(zh��ng)�ȣ�����“��������������(g��)�A���Ͼ����Ų�”�ļ��O(sh��)���ɵó� 3 �λ��L(zh��ng)�ıȼ����@ 3 ��(g��)�^(q��)���(n��i)������(sh��)���ıȡ�
�������P(gu��n)֪�R(sh��)���]��Ӌ(j��)��C(j��)ҕ�X(ju��)�D��̎��Փ����ô�l(f��)��ei�ڿ�
�����F(xi��n)�ڣ���֪ EF ��������������������֪�����еĈD��ͶӰ�L(zh��ng)�Ȟ� b(MN)�����������(c��)��������ͶӰ�L(zh��ng)�Ȟ� a(GM)���҂�(c��)�� c(NH)���돽�L(zh��ng) r=(a+b+c)/2�������С����(c��)���҂�(c��)�Ļ��L(zh��ng)�քeӛ�� lb��la��lc���䌦(du��)��(y��ng)�����L(zh��ng)�քeӛ�� Sb��Sa��Sc���ɈA��(n��i)��ֱ�������ε����|(zh��)�ɵ�
����5 ������(sh��)���ٹ��㷽��
����������(sh��)���ٹ���Ļ���˼��ͬ���Д�(sh��)�������跽��ͬ�����w�IJ��E���£�
����S1������ǰ�������������D(zhu��n)����D�_��������������ӛ������(sh��)�� 1;
����S2�����������������c(di��n)���� y �Sؓ(f��)�����M(j��n)����������(����c(di��n)���Ҷ��c(di��n)�������c(di��n))��ֱ�����赽��һ��(g��)������ֹ;
����S3��ͨ�^(gu��)݆����ۙ�㷨(���x(ch��ng)�S��)�_�� S2 ���E�е�����݆����Ϣ����������(sh��)�Լ� 1�����Ԅ����赽������݆�����µ����c(di��n)�^�m(x��)���� y �Sؓ(f��)�����M(j��n)���������裬ֱ�����賬�^(gu��)������݆��߅���ֹ���õ� y �Sؓ(f��)����������(sh��);
����S4���������������������c(di��n)���� y �S�������M(j��n)���������裬�����؏�(f��)���E S2��S4��ֱ�����賬�^(gu��)����݆��߅���ֹ���õ� y �S������������(sh��);
����S5������(j��) y �Sؓ(f��)����������(sh��)�� y �S������������(sh��)Ӌ(j��)��õ������������ϵ�������(sh��)���������㷨��(y��ng)������һ����������һ�������ϣ��ɵõ�������������������(sh��)��������ƽ������Ӌ(j��)��õ�ԓ�����ƽ��������(sh��)��
�����D 8 �@ʾ�˹���������(sh��)���R(sh��)�eЧ����
����6 ԇ�(y��n)�c����
����6.1 ���L(zh��ng)����֜y(c��)���㷨���Ȝy(c��)ԇ
����������������L(zh��ng)����֞�y(c��)ԇ��(du��)���(y��n)�C��ϵ�y(t��ng)��(bi��o)����ͶӰ׃�Q������[�ŵȜy(c��)�������Ĝy(c��)�����ȡ�ԇ�������£�
����ȡ�Խ�ϵ���s��ϵ�� 30 ��������ӱ�����y(c��)����(du��)��;ÿ��ͬ�r(sh��)�y(c��)�� 5 �������룬����������[�����d���_(t��i)��;�y(c��)���ꔵ(sh��)��(j��)֮�����Θ�(bi��o)����(���� 300 mm������ 0.02 mm)�քe�y(c��)���@ 5 �����Č�(sh��)�H���L(zh��ng)���;��?y��)Qһ�M(5 ��(g��))�����룬�؏�(f��)�������E��ֱ�����й��붼�y(c��)����ɞ�ֹ��ÿ��Ӌ(j��)���`���ȡ�^��(du��)ֵ���y(c��)���Y(ji��)����� 1 ��ʾ��
�����ı� 1 �п��Է����õ�����(j��ng)�^(gu��)ͶӰ�����㷨�����L(zh��ng)����ֵĜy(c��)�������� 95%���ϣ�ƽ���`��С�� 3%�����ȝM��Ҫ��
����6.2 ���Д�(sh��)�c������(sh��)�㷨���Ȝy(c��)ԇ
������������������Д�(sh��)��ż��(sh��)�@��(g��)����W(xu��)���������Ԝy(c��)���`���Д�(sh��)Ҳ�� 2 �ı���(sh��)���������Д�(sh��)��ֵ�����_�ģ���˜y(c��)�����Ȳ������`���ʺ���������(y��ng)ԓʹ�����`���ʁ�(l��i)��������ָ�y(c��)����(zh��n)�_�����Д�(sh��)�Ęӱ���(sh��)��ռ���ӱ���(sh��)���İٷֱȡ��y(c��)ԇ���Д�(sh��)�Լ�������(sh��)�Ĝy(c��)������ԇ�(y��n)�������£�
�������҃�(n��i)���խh(hu��n)���£��քeȡ 30 ���Խ�ϵ����� 30 ���s��ϵ���룬�M(j��n)�ЈD��ɼ����y(c��)�����˹�Ӌ(j��)��(sh��)�����Д�(sh��)��������(sh��)����ֵ;����ͬ�ӵĘӱ����ړQ��������խh(hu��n)�����M(j��n)��ͬ�ӵĈD��y(c��)���c��ֵ�˹�Ӌ(j��)��(sh��);���y(c��)��ֵ�c��ֵ�M(j��n)�Ќ�(du��)�Ƚy(t��ng)Ӌ(j��)�c�`������������Y(ji��)����� 2 ��ʾ��
���������� 2 �Д�(sh��)��(j��)���l(f��)�F(xi��n)���s��ϵ���Խ�ϵ�����Д�(sh��)�y(c��)�����`������ 93%���ϣ�������(sh��)�Ĝy(c��)���^��(du��)�`���� 2 �����ң��܉�M��y(c��)��Ҫ��
����6.3 �㷨�ٶȜy(c��)ԇ
�����㷨�ٶȜy(c��)ԇ����Ӌ(j��)��C(j��)���p�� 1.9 GHz��2 G ��(n��i)�棬�����@�����\(y��n)��ƽ�_(t��i) Windows 7���ٶȜy(c��)ԇ�������£�
�����քeȡ 30 ���s��ϵ���룬�\(y��n)�õ� 1 ��(ji��)��������ԇ�(y��n)ϵ�y(t��ng)�M(j��n)�Мy(c��)��;�y(c��)��Ӌ(j��)�r(sh��)�_(k��i)ʼ���� 5 ����λ�M(j��n)���� �Μy(c��)�����[�şo(w��)ճ�B����Ӌ(j��)�y(c��)�� 6 ��;ͬ��ȡ 30 ����룬�ٜy(c��)ԇ�[��ճ�B��r�y(c��)���Õr(sh��);��ȡ 30 ���s��ϵ���룬�M(j��n)�������Õr(sh��)�y(c��)��������K�y(t��ng)Ӌ(j��)�����Y(ji��)�����ٶȜy(c��)ԇ�Y(ji��)����� 3 ��ʾ��
���������ϱ� 3 �Д�(sh��)��(j��)��֪�����IJ��õ�ԇ�(y��n)ϵ�y(t��ng)��ƽ���y(c��)���ٶȞ� 32.30 ��/min���������������IJ���ȫ�����g(sh��)�������뿼�Nָ��(bi��o)�y(c��)�������У��y(c��)���������Ŀ��Nָ��(bi��o)����Ҫ���ĵĕr(sh��)�g��s�� 30 s[2]������^���ԣ���������ķ����ھ��ȝM��Ҫ���ǰ���£������^��Ĝy(c��)���ٶȣ���(du��)�ڌ�(sh��)�F(xi��n)���������N������Ҫ�ą����r(ji��)ֵ��
����7 �Y(ji��) Փ
����������������Ķd���ʡ����Д�(sh��)��������(sh��)�Ȯa(ch��n)���M���Ԡ���о���(du��)��ᘌ�(du��)Ŀǰ�ֹ��y(c��)������Ч�ʵ͡����^�`����ҟo(w��)������������ԭʼ���N���ϵȆ�(w��n)�}�����ڿ�Ҋ(ji��n)����S����@ȡ�������S�����Ԡ��(sh��)�����Y(ji��)�Ϲ����ɫ���������������W(xu��)Ҏ(gu��)�ɷքe����ͶӰ����ģ�͡����Д�(sh��)���ٹ���ģ�͡�������(sh��)Ӌ(j��)��ģ�ͣ����_Ӌ(j��)�����L(zh��ng)����֡����Д�(sh��)�Լ�������(sh��)���Ԡ��(sh��)��ԇ�(y��n)�Y(ji��)��������ԓ�����m����ճ�B����̎�����Ҍ�(du��)���խh(hu��n)��Ҫ��ͣ����Д�(sh��)��������(sh��)�����`������ 93%���ϣ��y(c��)���ٶȿ��_(d��) 30 ��/min ���ϣ���(du��)�ڌ�(sh��)�F(xi��n)��ͨ�����N������(x��)�����N����Ҫ�ą����r(ji��)ֵ��
�������ڱ���Ӌ(j��)�㔵(sh��)��(j��)���M(j��n)һ������Ӌ(j��)�����������(l��i)��(�R�X��Ӳ����)�������ֲ�Ҏ(gu��)�ɵȾ���(x��)���Ԡ�ָ��(bi��o)���Ǻ��m(x��)���о�����——Փ�����ߣ��ܽ��x���R �J�� ����º����� �ƣ��� Խ�����Ԗ|����B������ ��