�l(f��)���r(sh��)�g��2022-03-21���ٷ�����̎��QՓ���g�[��1��
ժ Ҫ�� ժҪ�������C(j��)������ָ����(j��)�����W(xu��)ԭ����ģ������Y(ji��)��(g��u)���\(y��n)��(d��ng)���Ե��O(sh��)Ӌ(j��)�����܃�(y��u)Խ�ęC(j��)�ϵ�y(t��ng)������u�ڷ��ַ�����̫��̽�������U(xi��n)�Ȟ�(z��i)�Ȳ��m�����ˁ��Г�(d��n)�΄�(w��)�ĭh(hu��n)�����@�����õđ�(y��ng)��ǰ�������չ����h(hu��n)���Ɍ������C(j��)���˷֞��������C(j��)���ˡ����з����C(j��)�����Լ�ˮ�·����C(j��)
����ժҪ�������C(j��)������ָ����(j��)�����W(xu��)ԭ����ģ������Y(ji��)��(g��u)���\(y��n)��(d��ng)���Ե��O(sh��)Ӌ(j��)�����܃�(y��u)Խ�ęC(j��)�ϵ�y(t��ng)������u�ڷ��ַ�����̫��̽�������U(xi��n)�Ȟ�(z��i)�Ȳ��m�����ˁ��Г�(d��n)�΄�(w��)�ĭh(hu��n)�����@�����õđ�(y��ng)��ǰ�������չ����h(hu��n)���Ɍ������C(j��)���˷֞��������C(j��)���ˡ����з����C(j��)�����Լ�ˮ�·����C(j��)�������ָ�������C(j��)���˽�(j��ng)�v��ԭʼ̽�������^�����c�\(y��n)��(d��ng)�������C(j��)�ϵ�y(t��ng)�c�������ܲ����ں�����(g��)�A�Σ�������������C(j��)���ˇ���(n��i)���о��F(xi��n)������l(f��)�F(xi��n)��(d��ng)ǰ�о�߀�����������\(y��n)��(d��ng)�C(j��)���о�����Y(ji��)��(g��u)�O(sh��)Ӌ(j��)�����ϑ�(y��ng)�á��(q��)��(d��ng)�����Ʒ�ʽ����^����y(t��ng)�����������ʵ͵Ȇ��}����(d��o)���˷����C(j��)���ˏĺ��^���^�c���ﶼ�����^����“���ƶ�����”���h(yu��n)δ�_(d��)����(sh��)�H��(y��ng)�ó̶ȡ�ָ�������C(j��)������������?c��)��ϽY(ji��)��(g��u)�������Y(ji��)��(g��u)�����ϡ��(q��)��(d��ng)һ�w������(j��ng)Ԫ����(x��)���ƣ���Ч�������D(zhu��n)�Q�������ϵ�y(t��ng)����l(f��)չ��
�����P(gu��n)�I�~�������C(j��)����;��?c��)��ϽY(ji��)��(g��u);�Y(ji��)��(g��u)�����(q��)��(d��ng)һ�w��;�����ϵ�y(t��ng)
����0 ǰ��*
������(d��ng)�������ϴ��ڵ�ǧ�f�N������ǽ�(j��ng)�^�|�f����m��(y��ng)���M(j��n)�����l(f��)չ�������@ʹ�������w��ijЩ��λ�ɊZ�칤����������څ����������������������(y��u)���ĽY(ji��)��(g��u)���c(di��n)���`����\(y��n)��(d��ng)���ԡ��Լ����õ��m��(y��ng)�Ժ������������Թ��ԁ����S����ʵ���Ȼ�粻�༤�l(f��)���̽��������һֱ����a(ch��n)�����N���g(sh��)˼��Ͱl(f��)����(chu��ng)���`�в��������ȡ֮���ߵ�֪�R(sh��)����͌W(xu��)��(x��)ԴȪ��������Ȼ������Ȼ��W(xu��)��(x��)�����÷����W(xu��)ԭ�����O(sh��)Ӌ(j��)���������͵ęC(j��)�����O(sh��)�䡢���Ϻ������ķ���ϵ�y(t��ng)���ǽ�������ٰl(f��)չ���о��I(l��ng)��֮һ[1-2]��
���������W(xu��)���о�����ϵ�y(t��ng)�ĽY(ji��)��(g��u)���Ԡԭ�����О��Լ�����ã��Ķ��鹤�̼��g(sh��)�ṩ�µ��O(sh��)Ӌ(j��)˼�롢����ԭ����ϵ�y(t��ng)��(g��u)�ɵļ��g(sh��)�ƌW(xu��)����һ�T�����ƌW(xu��)�����|(zh��)�ƌW(xu��)����(sh��)�W(xu��)�c���W(xu��)����Ϣ�ƌW(xu��)�����̼��g(sh��)�Լ�ϵ�y(t��ng)�ƌW(xu��)�ȌW(xu��)�ƵĽ���W(xu��)��[3]��1960 �� 9 �£���һ����������W(xu��)���(hu��)�������������ݵĿ�܊�������_���˺��ʮ���У������������չ�_�������g(sh��)�о��������W(xu��)��Փ�ͼ��g(sh��)Ѹ�ٰl(f��)չ���µķ���ԭ���ͷ����b�䲻��ӿ�F(xi��n)[4]���҇��� 2003 �����_�˃Ɍ���ɽ��(hu��)�h������ 214 ��“�w�к��΄�(d��ng)�������W(xu��)�ͷ�����(y��ng)��”�͵� 220 ��“�����W(xu��)�ĿƌW(xu��)���x�cǰ��”���˺��ַքe�� 2010 ��� 2011 �����_�˵� 387 ��“���ӷ���”���� 395 ��“��Ч���������|(zh��)����Ȼ����ϵ�y(t��ng)�YԴ�����c����”�Լ��� 411 ��“���������c�������Y(ji��)��(g��u)�����W(xu��)�c����”������ɽ��(hu��)�h������M(j��n)�����W(xu��)�Ƶİl(f��)չ���ɼ��ִ�W(xu��)���̷������������c(di��n)��(sh��)�(y��n)��(li��n)�� 15 ��(g��)���ҵķ����W(xu��)�ߠ��^�l(f��)�������“���H�������̌W(xu��)��(hu��)”���W(xu��)��(hu��)�ؕ�̎�O(sh��)���Ї����@�LJ��H�W(xu��)�g(sh��)�猦(du��)�҇����������о�ˮƽ�͌W(xu��)�g(sh��)��λ���J(r��n)�ɡ�
���������W(xu��)�о��ă�(n��i)�ݰ������W(xu��)���������ӷ�������Ϣ�c���Ʒ��������������ȡ����У����W(xu��)������Ҫ�о�����ĺ��^�Y(ji��)��(g��u)���ܣ�����������o���W(xu��)���Ժ̈́�(d��ng)���W(xu��)����;���ӷ�����Ҫ�о�������^���ԣ����������w��(n��i)ø�Ĵ����á�����Ĥ���x���Ե�;��Ϣ�c���Ʒ�����Ҫ�о����(du��)��Ϣ��̎���^�̣���������ĸ��X���١���(j��ng)Ԫ�c��(j��ng)�W(w��ng)�j(lu��)��;����������Ҫ�nj�(du��)�����w��(n��i)�����D(zhu��n)�Q�^�̺���ꐴ��x�M(j��n)���о����������A��������D(zhu��n)�Q���������ٵİl(f��)��ȡ������W(xu��)���о�һ��ɷ֞������������� ��(du��)����ԭ�ͺ�����C(j��)���M(j��n)���о�;�� ������ģ���Ô�(sh��)�W(xu��)�ķ����M(j��n)�б�ʾ;�� ����(j��)��(sh��)�W(xu��)ģ����������ڹ��̼��g(sh��)���M(j��n)��ԇ�(y��n)�Č�(sh��)��ģ��[5]��
���������C(j��)�����Ƿ����W(xu��)�c�C(j��)�����I(l��ng)��(y��ng)������ĽY(ji��)�Ϯa(ch��n)��ęC(j��)���˵ĽǶȁ����������C(j��)���˄t�ǙC(j��)���˰l(f��)չ�ĸ�(j��)�A��[6]���������Ԟ�C(j��)���˵��O(sh��)Ӌ(j��)�ṩ���S������ą�����ʹ�ÙC(j��)���˿��ԏ������w�όW(xu��)��(x��)�����m��(y��ng)�ԡ������ԡ��\(y��n)��(d��ng)�����Ժ��`���Ե�һϵ�����õ�����[7]�������C(j��)���˰����乤���h(hu��n)���ɷ֞��������C(j��)���ˡ����з����C(j��)���˺�ˮ�·����C(j��)�������N�����⣬߀��һЩ�о��C(j��)��(g��u)�о���ˮꑃɗ��C(j��)����[8-9]��ˮ�Ճɗ��C(j��)����[10]�Ⱦ��оC����;�ķ����C(j��)���ˡ������C(j��)����ͬ�r(sh��)��������͙C(j��)���˵����c(di��n)���ѽ�(j��ng)��u�ڷ��ַ�����̽��̫�ա����U(xi��n)�Ȟ�(z��i)�Ȳ��m�����ˁ��Г�(d��n)�΄�(w��)�ĭh(hu��n)�����@�����õđ�(y��ng)��ǰ��[11]��
����������Ȼ�ƌW(xu��)����ί�T��(hu��)(���º��Q“NSFC”) �dz���ҕ��(du��)�����C(j��)�����(xi��ng)Ŀ����������(y��u)�x���Y��������Ŀǰ��ԓ�I(l��ng)����(xi��ng)Ŀ��Ո(q��ng)��Ҫ�����ڙC(j��)е���̌W(xu��) �� (E05 �� �a ) �� E0501( �C(j��)��(g��u)�W(xu��)�c�C(j��)���� ) �� E0507(�C(j��)е�����W(xu��))2 ��(g��)����(j��)�y(t��ng)Ӌ(j��)����ֹĿǰ�� NSFC �� E05 �����Y�������(xi��ng)Ŀ 137 �(xi��ng)���Y����(j��ng)�M(f��i) 7 460 �fԪ;�Y�����ҽܳ�����ƌW(xu��)�����(xi��ng)Ŀ 2 �(xi��ng)���Y����(j��ng)�M(f��i) 160 �fԪ;�Y������ƌW(xu��)�����(xi��ng)Ŀ 81 �(xi��ng)���Y����(j��ng)�M(f��i) 1 876.4 �fԪ;�Y���ش��(xi��ng)Ŀ 1 �(xi��ng)���Y����(j��ng)�M(f��i) 1 500 �fԪ;�Y�����c(di��n)�(xi��ng)Ŀ 8 �(xi��ng)���Y����(j��ng)�M(f��i) 1 590 �fԪ;�Y���^(q��)�ƌW(xu��)�����(xi��ng)Ŀ 3 �(xi��ng)���Y����(j��ng)�M(f��i) 150 �fԪ���e�ǽ�������Y���������^�����L��
����1 �����C(j��)������F(xi��n)��
���������C(j��)���˵ij��F(xi��n)�ܺõ��w�F(xi��n)�˷�����(y��ng)�õ������D 1 ��ʾ����������M(j��n)�����������C(j��)���˵�̽�������Ї������r(sh��)�ڵ�ľţ���R�Լ� 1893 ���� Rygg �O(sh��)Ӌ(j��)�ęC(j��)е�R[12];��Σ��M(j��n)���˿��з����C(j��)����̽��������ģ���B��w���M(j��n)�Г����w�����O(sh��)Ӌ(j��)��1485 ���_(d��)�����O(sh��)Ӌ(j��)�ē����w�C(j��)�D���������ϵ�һ��(g��)���ռ��g(sh��)Ҏ(gu��)���M(j��n)�е��O(sh��)Ӌ(j��);�����ˮ�·����C(j��)���˵�̽�����v�^�����C(j��)���˰l(f��)չ�v�̣����F(xi��n)�ڞ�ֹ��(j��ng)�v������(g��)�A�Ρ���һ�A����ԭʼ̽���r(sh��)�ڣ�ԓ�A����Ҫ������ԭ�͵�ԭʼģ�£���ԭʼ���w������ģ�M�Bij����(d��ng)��ԓ�A����Ҫ�������(q��)��(d��ng)���� 20 ���o(j��)�к��ڣ�����Ӌ(j��)��C(j��)���g(sh��)�ij��F(xi��n)�Լ��(q��)��(d��ng)�b�õĸ��£������C(j��)�����M(j��n)�뵽�ڶ���(g��)�A�Σ����^�����c�\(y��n)��(d��ng)�����A�Ρ�ԓ�A����Ҫ�����ÙC(j��)�ϵ�y(t��ng)��(sh��)�F(xi��n)�T�����ߡ����S���w�е����﹦�ܣ�����(sh��)�F(xi��n)��һ���̶ȵ��˞���ơ��M(j��n)�� 21 ���o(j��)���S�����(du��)����ϵ�y(t��ng)�����������γəC(j��)���J(r��n)�R(sh��)�IJ������룬�Լ�Ӌ(j��)��C(j��)���g(sh��)�İl(f��)չ�������C(j��)�����M(j��n)���˵�����(g��)�A�Σ��C(j��)�ϵ�y(t��ng)�_ʼ�c���������M(j��n)�в����ںϣ�����y(t��ng)�Y(ji��)��(g��u)�c�������ϵ��ں��Լ������(q��)��(d��ng)���\(y��n)�á���(d��ng)ǰ���S������C(j��)���J(r��n)�R(sh��)�����롢���ܿ��Ƽ��g(sh��)�İl(f��)չ�������C(j��)����������Ă�(g��)�A�ΰl(f��)չ�����Y(ji��)��(g��u)�c��������һ�w���������ϵ�y(t��ng)����(qi��ng)�{(di��o)�����C(j��)���˲��H����������ΑB(t��i)�������\(y��n)��(d��ng)��ʽ��ͬ�r(sh��)�߂���������Ҹ�֪�����ҿ��Ƶ��������ԣ����ӽ�����ԭ�͡����S�����(du��)���X�Լ���(j��ng)ϵ�y(t��ng)�о������룬�����X����(j��ng)ϵ�y(t��ng)���Ƴɞ���ԓ�I(l��ng)��ƌW(xu��)���P(gu��n)ע��ǰ�ط���
�����҇������о����^������ 30 ����� NSFC �Ĵ����Y���£���(j��ng)�v�˸�ۙ�����о���ģ����ɹ����ֲ��I(l��ng)���R�^���M(j��n)����(g��)�A�Ρ��籱�����պ����W(xu��)�Oï��������Navier-Stokes���̔�(sh��)ֵ��͜u��(d��ng)���W(xu��)��Փ�о���ģ�����x�����Ƕ����\(y��n)��(d��ng)�r(sh��)�Ě��(d��ng)�����ԣ���������x�a(ch��n)���������ęC(j��)�������ͷ��������w�������O(sh��)Ӌ(j��)�ṩ����Փ���A(ch��)���ڇ��H���x�����w�ЙC(j��)���о�����ռ��һϯ֮��[13]�������I���I(y��)��W(xu��)����������Ƶ������ָ�`���֣����`���\(y��n)��(d��ng)���M(j��n)����Ʒ��ץȡ�����g(sh��)ָ��(bi��o)�c����ͬa(ch��n)Ʒ�ஔ(d��ng)[14]��
�������죬�����C(j��)���˷N��࣬������Ҫᘌ�(du��)�������C(j��)���ˡ����з����C(j��)���ˡ�ˮ�·����C(j��)�����I(l��ng)���еIJ��ֵ����о������M(j��n)�н�B�c������
����1.1 �������C(j��)����
��������Ȼ���У����������\(y��n)��(d��ng)��ʽ��N���ӣ����p���\(y��n)��(d��ng)��ʽ�������;�ж������з�ʽ���繷���ڻ���;�Пo���Ƅ�(d��ng)��ʽ�������;�����S��ʽ����������ܡ����x�ȡ��о��ˆT���@Щ����ĽM���Y(ji��)��(g��u)���\(y��n)�з�ʽ�ȷ���õ����l(f��)���M(j��n)�����������C(j��)���˵��о�����Ҫ�з��˙C(j��)���ˡ����������Ƅ�(d��ng)�C(j��)���ˡ��������ΙC(j��)���˺ͷ������S�C(j��)���˵ȡ�
����1.1.1 ���˙C(j��)����
�������˙C(j��)������ָһ���̶Ⱦ����˵�������������һ���̶��Ƅ�(d��ng)����֪���������W(xu��)��(x��)��(li��n)��ӛ������н����ȹ��ܵ����ܙC(j��)���ˣ������m��(y��ng)�����������h(hu��n)�����@��һ��(g��)�ںϙC(j��)е��ӡ�Ӌ(j��)��C(j��)�ƌW(xu��)���˹����������м��(q��)��(d��ng)���g(sh��)�ȶ��T�W(xu��)�Ƶĸ��y���о������Ǹ�����Ϳ�����Փ���̼��g(sh��)���о�ƽ�_(t��i)��Ҳ��Ŀǰ�����C(j��)���˼��g(sh��)�о��о�������(zh��n)�Ե��y�}֮һ�����˙C(j��)���˵��о������Ƅ�(d��ng)�����W(xu��)���˹����܌W(xu��)��Ӌ(j��)��C(j��)�ƌW(xu��)�����ϿƌW(xu��)�����P(gu��n)�W(xu��)�Ƶİl(f��)չ����˾�����Ҫ���о��r(ji��)ֵ�����x��
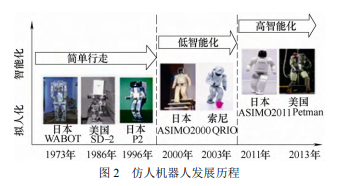
������D 2 ��ʾ�����˙C(j��)���˽�(j��ng)�^�ˎ�ʮ��İl(f��)չ��������Ć�Ԫ���܌�(sh��)�F(xi��n)���Hģ�����M(j��n)�к������ߣ��l(f��)չ���ܳ�����֪���h(hu��n)���ĵ����ܻ����ٵ��F(xi��n)�ڼ���ҕ�X���|�X�ȶ��(xi��ng)���g(sh��)���ܸ���(j��)���h(hu��n)��׃�����������{(di��o)������ɶ��(xi��ng)��(f��)�s�΄�(w��)�ĔM�˻��������ܻ�ϵ�y(t��ng)��
�������˙C(j��)���˵������_ʼ�� 20 ���o(j��) 60 ���ĩ���p�㲽�ЙC(j��)���ˡ��ձ��絾���W(xu��)����չ�_��ԓ������о�����[15]�������Ƶ� WAP��WL�Լ� WABOTϵ�ЙC(j��)�����܌�(sh��)�F(xi��n)�������߹��ܡ��ڴ����g���ձ����������W�ˡ��n���ȇ��ҵĶ�ҙC(j��)��(g��u)���M(j��n)���˷����ΙC(j��)���˵��о�̽����������ȡ�����S��ͻ���Եijɹ����������A����Ԫ����ʿ 1986 �����Ƴ���������һ�_(t��i)�p�㲽�ЙC(j��)���� SD-1 �Լ�����M(j��n)�� SD-2[16]��ԓ�A����Ҫ߀�ǂ�(c��)�،�(sh��)�F(xi��n)�C(j��)���˵����߹��ܣ����܌�(sh��)�F(xi��n)һ���̶ȵĿ��ơ��M(j��n)�� 21 ���o(j��)���S�������Լ����ܿ��Ƽ��g(sh��)�İl(f��)չ�����˙C(j��)���˾���һ���ĸ�֪ϵ�y(t��ng)���ܫ@ȡ���h(hu��n)���ĺ�����Ϣ�����������ε��Дಢ����(y��ng)�{(di��o)���Լ��Ą�(d��ng)����ʹ���\(y��n)��(d��ng)�����B�m(x��)�������籾�﹫˾�� 2000 ���аl(f��)�ķ����ΙC(j��)����“ASMIO2000”���H�����˵����^��߀���������A(y��)�y(c��)��һ��(g��)��(d��ng)������ǰ��׃���ģ�����D(zhu��n)���r(sh��)�IJ��Є�(d��ng)���B�m(x��)�������������磬�ǵ�һ��(g��)��������Ӱ����ķ����ΙC(j��)����[17]�����ṫ˾ 2003 ���Ƴ���“QRIO”�C(j��)�����״Ό�(sh��)�F(xi��n)�˷��˙C(j��)���˵��܄�(d��ng)[18]���������“BIP2000”�C(j��)����[19]�����ṫ˾��“SDR”ϵ�ЙC(j��)����[20]���ձ� JVC ��˾���Ƶ�“J4”�C(j��)���ˡ��n����“HUBO”�C(j��)����[21]����(sh��)�F(xi��n)���T��վ���������ݡ��ܲ������ٵȏ�(f��)�s��(d��ng)����
�����S��������Փ�İl(f��)չ�c���Ƽ��g(sh��)���M(j��n)�������˙C(j��)���������Ը���(qi��ng)���܌�(sh��)�F(xi��n)��(d��ng)������(f��)�s���\(y��n)�и���(w��n)�������ܸ���(j��)�h(hu��n)���ĸ�׃�����������Д�Y(ji��)���Ԅ�(d��ng)�_���c֮���m��(y��ng)�Ą�(d��ng)�����籾�� 2011 ��l(f��)���� “ASIMO2011”�C(j��)����(�D 3)���C����ҕ�X���|�X�����w�R(sh��)�e���g(sh��)�����M(j��n)�м�(x��)�����I(y��)��������ƿ�ӔQ�_ƿ�w����ƿ��Һ�wע����ܛ�����ȣ�߀������(j��)��������ք�(sh��)��ָ����������(y��ng)��(d��ng)�������⣬߀�߂��˻�����ӛ���c���R(sh��)����[22]��2013 ��������ʿ�D��(d��ng)����˾���Ƶ�“ATLAS”�C(j��)����(�D 4)�Ǯ�(d��ng)ǰ�����ΙC(j��)���˵�һ��(g��)���������˾����������^��߀�߂�������ε��R(sh��)�e���Д��Լ��Q�߹��ܣ���һ������^�����ܻ�����˙C(j��)���ˡ�ԓ�C(j��)�������ڂ��͎��ϴ�ǰ�M(j��n)�����_���͎���ͻȻ���F(xi��n)��ľ�壬�ĸ�̎���·�(w��n)��(w��n)��أ��܃��ȷ��_�������߅���^���܆���վ�������Ă�(c��)�����������ײ������[23]��ԓ��˾�_�l(f��)����һ��������܊�z�(y��n)���o(h��)�����ܵ�܊�ÙC(j��)����“Petman”(�D 5)�����˾����^���`����⣬߀���{(di��o)���������w�ء���Ⱥ��ź�����ģ�M�������W(xu��)�е����ұ��o(h��)���ܣ��ѽ�(j��ng)һ���̶��Ͼ����������������[24]��
�������˙C(j��)������һ��(g��)�о�������Ƿ����ֱۺ��`����ָ���о�������������^���β���(sh��)�F(xi��n)�����\(y��n)��(d��ng)�A�ΰl(f��)չ���F(xi��n)�ڼ��\(y��n)��(d��ng)��֪��һ�w�����܌�(sh��)�F(xi��n)��������T��ץȡ�ȼ�(x��)�����ęC(j��)�ϵ�y(t��ng)�������������၆��W(xu��) TOMOVIC ��[25]�� 1962 ��ᘌ�(du��)�����������O(sh��)Ӌ(j��)��“Belgrade”���J(r��n)���������������`���֣�ֻ�܌�(sh��)�F(xi��n)���΄�(d��ng)����SALISBURY ��[26]�� 1982 ���O(sh��)Ӌ(j��)��“Stanford/JPL”�������״�����������λ�á��|�X�����Ȃ��й��ܣ��_��(chu��ng)�˶�ָ��(sh��)�Hץȡ�������Ⱥӣ��Ǯ�(d��ng)�r(sh��)�����F(xi��n)�ڶ��ܾ��д����ԵęC(j��)е�֡��˺C(j��)е�ֳ��������`��������ܵķ���l(f��)չ��2010 �������� DLR ���Ƶ���-��(li��n)��ϵ�y(t��ng)“Hasy”�C(j��)е�ֱ�(�D 6)���������� 21 ��(g��)���ɶȣ��ǵ�һ��(g��)���÷����W(xu��)�P(gu��n)��(ji��)�M(j��n)����ָ�O(sh��)Ӌ(j��)�Ķ�ָ�`���֣���ָ�P(gu��n)��(ji��)���\(y��n)��(d��ng)ģ�������M(j��n)������|����(d��ng)�����džμ����D(zhu��n)��(d��ng)��ʹ���\(y��n)��(d��ng)�����c�����ָ���ӽӽ�[27]������(n��i)�����ΙC(j��)�����о����^����2000 ������ƌW(xu��)���g(sh��)��W(xu��)���Ƶ�“������”(�D 7)���҇���һ�_(t��i)�����ΙC(j��)����[28]�������������W(xu��)�� 2002 �����Ƶķ��˙C(j��)����“BHR”(�D 8)��ͻ����ϵ�y(t��ng)���ɼ��g(sh��)����(sh��)�F(xi��n)�˟o�����|�����ߣ�����δ֪�����Ϸ�(w��n)���������܌�(sh��)�F(xi��n)̫�Oȭ���ݵȏ�(f��)�s��(d��ng)��[29]�������I���I(y��)��W(xu��)�����_�l(f��)��“HIT”ϵ���p�㲽�ЙC(j��)���ˌ�(sh��)�F(xi��n)���o���B(t��i)�̈́�(d��ng)���B(t��i)���У��܉����ǰ/���С���(c��)�С��D(zhu��n)���������_(t��i)�A����б�µȄ�(d��ng)��[30]�����A��W(xu��)�����_�l(f��)�ķ��˙C(j��)����“THBIP”(�D 9)���ê�(d��)����(d��ng)�Y(ji��)��(g��u)���ɹ���(sh��)�F(xi��n)�o�|�B�m(x��)��(w��n)����ƽ�����ߡ��B�m(x��)�����_(t��i)�A�����Լ���ˮ��̫�Oȭ���c(di��n)�^�Ȅ�(d��ng)��[31]������������W(xu��) 2011 �����Ƴɹ���“�Rͯ 5” ���˙C(j��)����(�D 10)���������҇��F(xi��n)�A�η��˙C(j��)���˵����ˮƽ������ҕ�X���Z��(du��)Ԓ�����X��ƽ���X�ȹ��ܣ�ͻ���˻��ڸ���ҕ�X���`�Ʉ�(d��ng)�����ơ�ȫ��f(xi��)�{(di��o)��������(y��ng)���P(gu��n)�I���g(sh��)���ɞ����“�߳�”�\(y��n)��(d��ng)�����ęC(j��)���˽���[32]�����⣬�㽭��W(xu��)Ҳ�M(j��n)���˷��˙C(j��)���˵����ƣ�ͨ�^܉�E�A(y��)�еķ�������˙C(j��)���ˌ�(du��)��(f��)�s��r��̎����������(sh��)�F(xi��n)�˙C(j��)���˴�ƹ������\(y��n)��(d��ng)[33]��
�����ڷ����ֱ��c�`����ָ������о����������պ����W(xu��)���о��_չ�^�磬1993 ���Ƴɹ����҇���һֻ��ָ��“BUAA-I”�����S����M(j��n)�汾“BUAA-II” �ͺ�“BUAA-III”����ָ�����^�������Ϻ���ͨ��W(xu��)�� 2005 ���_ʼ�M(j��n)�л����X늵ęC(j��)е�ֱ۲����о��������о�������֫�ֵIJ������ܺͲ����`���ԣ��_�l(f��)���ܸ����M(j��n)������/�C(j��)еϵ�y(t��ng)�ӿ�[34]���ڴ˻��A(ch��)�������˾���“������”���ܵ���һ����֫��(�D 11)�������I���I(y��)��W(xu��)�c�� DLR (li��n)�����Ƶ������ָ�`����“HIT/DLR Hand”(�D 12)�����ж��֪�������\(y��n)��(d��ng)�`�ץȡ�^�̷��˻����܉����������ȡ����ָ��ȡ������ץȡ�����ִ�ץȡ����[14,35]��
�������P(gu��n)֪�R(sh��)���]���Q�u(p��ng)���l(f��)��Փ�Ķ��˺Æ�
����Ŀǰ���˙C(j��)�����о������T���P(gu��n)�I�C(j��)е��Ԫ�����w�\(y��n)��(d��ng)����(d��ng)�B(t��i)ҕ�X�ȶ��ȡ����ͻ�ƣ������c���\(y��n)��(d��ng)���`���ԺͿ��Ƶ����������߀�����h(yu��n)�����˙C(j��)���˵���K�l(f��)չĿ��(bi��o)���H�����μ��\(y��n)��(d��ng)��ʽģ���ˣ�����˼�S��ʽ���О鷽ʽҲ�ӽ��ˣ��܉�ͨ�^�c�h(hu��n)���Ľ�������@ȡ�µ�֪�R(sh��)����������ɸ��N�΄�(w��)��߀���Լ��m��(y��ng)�Y(ji��)��(g��u)����ǽY(ji��)��(g��u)���Ą�(d��ng)�B(t��i)�h(hu��n)����
����1.1.2 ���������Ƅ�(d��ng)�C(j��)����
�������������Ƅ�(d��ng)�C(j��)���˵��`�Ё�Դ����Ȼ�����������о��ˆT�Ĺ����ڻ����з���������������ϫ@���`�У��M(j��n)�нY(ji��)��(g��u)ģ���O(sh��)Ӌ(j��)������������õĵ����m��(y��ng)�������� 20 ���һֱ��һ��(g��)�dz����S���о��I(l��ng)���ܵ�������о��C(j��)��(g��u)���P(gu��n)ע����(j��ng)�^��ʮ���̽�������������Ƅ�(d��ng)�C(j��)���˵ęC(j��)��(g��u)�c���ƾ��õ��^��l(f��)չ���Ć�һģ�������Ƅ�(d��ng)�l(f��)չ���������ܿ��ƺ����õĭh(hu��n)����֪���������ӽ�����ԭ�͵��Ƅ�(d��ng)�C(j��)���ˡ�
����20 ���o(j��) 60 ������ڣ�ͨ�������˾����������ʽ���ЙC(j��)����“Mosher”(�D 13)�����������˿��Ƶķ���ģ�M������������[36]���Ƿ��������Ƅ�(d��ng)�C(j��)���˼��g(sh��)�l(f��)չʷ�ϵ�һ��(g��)��̱����˺��S��Ӌ(j��)��C(j��)���g(sh��)���M(j��n)���������������Ƅ�(d��ng)�ęC(j��)�������^���F(xi��n)�����ձ��|�����I(y��)��W(xu��)���Ƶ�“TITAN”(�D 14)ϵ�����㲽�ЙC(j��)���ˣ����ж�N�\(y��n)��(d��ng)���B(t��i)�����ڃAб�Ę���������[37]��������ʿ�D��(d��ng)����˾ 2008 ��´����Ƶ�“Big dog”�C(j��)����(�D 15)�Ƕ����\(y��n)��(d��ng)�C(j��)���˵Ĵ��������Эh(hu��n)����֪�����õ��m��(y��ng)������ƽ�������ã���ʹ��(c��)�汻���w�_����Ҳ�ܺܿ��ͨ�^�{(di��o)�����B(t��i)�֏�(f��)ƽ���B(t��i)��������ɽ�¡��^ѩ�ء���ʯ��·�������ݣ��ڹ⻬�ı������ߣ����������S���^�θܣ�������܊���\(y��n)ݔ[38]��ԓ��˾ 2013 ���������Ƶ�“�C��”�C(j��)����(�D 16)�܉�_�̣����D(zhu��n)��������ͻȻ���xֹͣ���c����ԭ���\(y��n)��(d��ng)�^�ӽ������ı����ٶ���߿��_(d��)�� 46 km/h����Ŀǰ�\(y��n)��(d��ng)�ٶ����ķ��������Ƅ�(d��ng)�C(j��)����[39]��
����߀�ЌW(xu��)�������x�������\(y��n)��(d��ng)�C(j��)���M(j��n)�з�������C(j��)���˵��_�l(f��)�������P˹����(ch��)��W(xu��)���Ƶķ������ЙC(j��)����(�D 17)���Ƿ������x�C(j��)�����е�һ��(g��)������������һ���ķ�����(n��i)���ߺ����S���܉��m��(y��ng)�ֲڵ؎������`����M(j��n)���܄�(d��ng)���D(zhu��n)�������ϵ�[40]�����ô���������W(xu��)���܈�(zh��)����W(xu��)�����ݴ�W(xu��)��������У������(n��i)��÷¡��W(xu��)�șC(j��)��(g��u)������������(j��)�о�Ӌ(j��)����(DARPA)���Y���£�������“RHex”ϵ����ʽ�C(j��)����(�D18������һ�N)[41]���������l�뻡��“������”���܉��p�Ɍ�(sh��)�F(xi��n)���������S���v�շ��D(zhu��n)�������Ȅ�(d��ng)�����о��ˆT߀�ıڻ����ڴ�ֱ���������߫@�Æ��l(f��)�������ڙC(j��)���ˡ�2010 ������˹̹����W(xu��)���� MARK ���Ƴ�“StickyBot ��”�±ڻ��C(j��)����(�D 19)���_�Ʋ��ø���𤸽���ϣ�ԓ�C(j��)���ˏ�����ԭ�����\(y��n)��(d��ng)��ʽ�����^�ӽ��挍(sh��)�ıڻ�[42]��
�����ɗ��C(j��)����Ҳ�Ƿ����������ЙC(j��)���˵�һ��(g��)�о�������ʿ�ƌW(xu��)�� 2007 ����ϔ��ģ��(du��)���аl(f��)��һ��C(j��)����“Salamander”(�D 20)���� 9 ��(ji��)�Sɫ���ϽM�ɣ����ϔ�ļ��裬�|�w�ϱ������ėl�ȣ�������ˮ����߮��Ҳ�������Є�(d��ng)��һ�����ߡ�����߀ģ��(d��ng)��ļ�����(j��ng)Ԫ���ڙC(j��)�����ϰ������˹���(j��ng)Ԫ��ͨ�^��׃ʩ���ڙC(j��)����“����”�ϵ�����ݼ���(sh��)�F(xi��n)�C(j��)�����Ƅ�(d��ng)��Ŀ��[9]��
�����ڇ���(n��i)����(du��)�������ЙC(j��)���˵��о����� 20 ���o(j��) 80 ���ĩ 90 ������ģ���(j��ng)�^��һ�Εr(sh��)�g�İl(f��)չ���҇����@����ļ��g(sh��)Ҳ�����L����M(j��n)�����Ϻ���ͨ��W(xu��)���Ƶ��P(gu��n)��(ji��)ʽ���㲽�ЙC(j��)���� “JTUWM-III”��������ˉ��������������û���λ�ú����Ļ�Ͽ��Ʒ���������ģ���㷨���˹���(j��ng)�W(w��ng)�j(lu��)ͬ�r(sh��)��(y��ng)�õ��ֲ�ʽ����ϵ�y(t��ng)��(d��ng)�У���(sh��)�F(xi��n)�˙C(j��)���˵ĵ��ل�(d��ng)�B(t��i)����[43]�������I���̴�W(xu��)�_�l(f��)�ăɗ������C(j��)езÿ�l���� 3 ��(g��)���ɶȣ������p���㲽�B(t��i)���܉�?q��)��F(xi��n)ǰ�M(j��n)�����ˡ������D(zhu��n)���͙M�е����߷�ʽ�����ж���Ժ�ȫ��λ�\(y��n)��(d��ng)����[44]���Ͼ����պ����W(xu��)���Ƶķ±ڻ����ЙC(j��)����(�D 21)���܌�(sh��)�F(xi��n)���Qֱ�����ϵ������\(y��n)��(d��ng)[45-46]���� 863 Ӌ(j��)���(xi��ng)Ŀ���Y���£�ɽ�|��W(xu��)[47]�������ƌW(xu��)���g(sh��)��W(xu��)[48]���Ϻ���ͨ��W(xu��)[49]�������I���I(y��)��W(xu��)[50]�M(j��n)���˷������㲽�ЙC(j��)���˵����ƣ�ȡ��һ���ɹ�������ɽ�|��W(xu��)���Ƶ�����Һ���(q��)��(d��ng)����C(j��)����“SCalf-1”(�D 22)������ 8 ��(g��)��������(d��ng)���ɶȺ� 4 ��(g��)�M�[����(d��ng)���ɶȣ���(sh��)�F(xi��n)������(du��)�^�鷀(w��n)���IJ��B(t��i)���ߣ�����ٶ��_(d��)�� 1.8 m/s[51]�����⣬��ɽ��W(xu��)���������պ����W(xu��)���Ї��ƌW(xu��)Ժ����Ԅ�(d��ng)���о����șC(j��)��(g��u)Ҳ���c�˷�������C(j��)���˵��о�������
������(d��ng)ǰ�����������Ƅ�(d��ng)�C(j��)�����ѽ�(j��ng)�܉��ڷǽY(ji��)��(g��u)���h(hu��n)����(sh��)�F(xi��n)��(w��n)�����ߣ���߀�h(yu��n)δ�_(d��)�����������ǘӵIJ��ЙC(j��)��(d��ng)�Ժ��`���ԣ����ڲ����ٶȵͣ�Ч�ʵ͵Ȇ��}���M(j��n)һ�������о����������Ƅ�(d��ng)�C(j��)���˵ĽY(ji��)��(g��u)���(q��)��(d��ng)��ʽ�Լ������㷨����ߙC(j��)���˵��ٶȺ��`���ԣ�ͬ�r(sh��)�ں���Ϣ��֪�c���ܿ��Ƽ��g(sh��)����ߙC(j��)���˵������ԣ����ǽ����о����c(di��n)֮һ��
����1.1.3 �����ΙC(j��)����
���������ΙC(j��)���������会(x��)�L�����w�Y(ji��)��(g��u)�Լ���(d��)�ص��\(y��n)��(d��ng)��ʽ���܉��Խխ�Ϻ��M(j��n)��ն������к�(qi��ng)�ĭh(hu��n)���m��(y��ng)�Ժ͵����\(y��n)��(d��ng)��(w��n)���ԣ���������y�Ե��_(d��)��δ֪�h(hu��n)���й�������˿ɱ��V����(y��ng)�õ��ƌW(xu��)̽�U(xi��n)���Ȟ�(z��i)���U(xi��n)�������ь��ȶ���(g��)�I(l��ng)���ܵ����������ˆT����A����(j��ng)�^��ʮ����о��������ΙC(j��)�����������(sh��)�F(xi��n)���ߵĻ����\(y��n)��(d��ng)�l(f��)չ���F(xi��n)�ڲ��H�܉�?q��)��F(xi��n)���ѡ��տs�ȶ�N��ʽ��ǰ�M(j��n)�\(y��n)��(d��ng)��߀���б��ϡ����������L�Լ�ˮ���΄�(d��ng)�ȶ�N���ܣ����߂�һ���h(hu��n)����֪������
�����ձ��|�����I(y��)��W(xu��)�����_ʼ���ΙC(j��)���˵����ƣ��� 1972 �������˵�һ�_(t��i)�����ΙC(j��)����[52]��������Ƶ�“ACM”ϵ�����ΙC(j��)���˲��H�����ƽ�������\(y��n)��(d��ng)��߀�܉���ɂ�(c��)��L��(d��ng)�������\(y��n)��(d��ng)���� S �����ȸ��N���g�\(y��n)��(d��ng)�����������Ƶ�“ACM-R5” ���ΙC(j��)����(�D 23)���������S�\(y��n)��(d��ng)������ˮꑃɗ����ܡ���ÿ��(g��)�P(gu��n)��(ji��)���и�����ƫ���ɂ�(g��)���ɶȣ����˿����b�زٿv�U���əC(j��)���˵�ꑵ�(c��)�L����(c��)�����ф�(d��ng)���Լ�ˮ���\(y��n)��(d��ng)[53]�����ǣ�ԓ�C(j��)���˟o���ڪMС���g�T��ܵ���(n��i)�\(y��n)��(d��ng)����ˣ�ԓ��(sh��)�(y��n)��������һ�N���(d��ng)ʽ���M(j��n)�����ΙC(j��)����“Slim Slime robot”[54] (�D 24)���� 6 ��(g��)����s��ģ�K��(g��u)�ɣ��������(d��ng)����ģ�K����s�M(j��n)�����ߣ����M(j��n)�ٶ���� 60 mm/s����չ�����ΙC(j��)���˵Ĺ������g��ԓ�A�Σ����ΙC(j��)���˵�Խ������һֱ�����_�о��ˆT��һ���y�}��ᘌ�(du��)ԓ���}��������Ъ����W(xu��) 2005 ��ɹ��_�l(f��)��һ������Ď��(q��)��(d��ng)�����ΙC(j��)����“Omni Tread”(�D 25)�����к�(qi��ng)���\(y��n)��(d��ng)�������܉��Խ����[55]������˷����ΙC(j��)���˵�Խ�����������ͻ�÷¡��W(xu��)(CMU)���Ƶ�һ�Nģ�K�����ΙC(j��)����(�D 26)���� 16 ��(g��)ģ�K�M�ɣ��܉��ڿ��g��(n��i)��(sh��)�F(xi��n)�����\(y��n)��(d��ng)�����ٵķ��L����ˮ�Լ����������U�Է��L���ˑB(t��i)�M(j��n)�Ѓ�(n��i)���������������@���M(j��n)������ʽ���ΙC(j��)���˷�����о���һ��(g��)�ش��ͻ��[56]���D 23 “ACM-R5”�C(j��)���� �D 24“Slim Slime robot”�C(j��)���ˈD 25 “Omni Tread” �D 26 ���ͻ�÷¡�����ΙC(j��)����
��������(n��i)�����ΙC(j��)�����о��_ʼ�� 20 ���o(j��)ĩ��1999 ���Ϻ���ͨ��W(xu��)��������������҇���һ�_(t��i)С�ͷ����ΙC(j��)���ˣ�ԓ�әC(j��)��һϵ�Є����B�U�B�Ӷ��ɣ�������ˮƽ���(n��i)��һЩ���εĄ�(d��ng)��[57]���Ї��ƌW(xu��)Ժ����Ԅ�(d��ng)�����LJ���(n��i)���ΙC(j��)�����о����^����ҳɹ��@���Ć�λ֮һ�������Ƶ��������ΙC(j��)���� (�D 27)���܉�?q��)��F(xi��n)�����\(y��n)��(d��ng)����s�\(y��n)��(d��ng)����(c��)���\(y��n)��(d��ng)�����L�\(y��n)��(d��ng)��ͬ�r(sh��)��(sh��)�F(xi��n)��ˮ��p������[58]������ͨ�^������(j��ng)Ԫ���Ʒ�������(qi��ng)�˙C(j��)���˵�������������[59]�����⣬�������պ����W(xu��)�������I���I(y��)��W(xu��)����ɽ��W(xu��)��Ҳ�M(j��n)���˷����ΙC(j��)���˵�̽���о�������——Փ�����ߣ������� 1 ꐵ��� 2 ꐿ�λ 2 ���ԏ�(qi��ng) 2