�l���r�g�����ٷ�����̎��QՓ���g�[��1��
ժ Ҫ�� ժҪ�������ݔ늾�·�����C���˵Ĺ���Ч�ʣ��_�����ܵ�Ŀ�ģ������һ�N�� S �����������ڙC�����\��܉�EҎ���ķ�����ԓ������������� S ���������T�����c���������y�ď��s S �������㷨�M���˸��M������ 4 �μӜp�ٺ��ˡ� 2 �μ���ǰ�M��܉�EҎ���㷨��ͬ�r߀�o����
����ժҪ�������ݔ늾�·�����C���˵Ĺ���Ч�ʣ��_�����ܵ�Ŀ�ģ������һ�N�� S �����������ڙC�����\��܉�EҎ���ķ�����ԓ������������� S ���������T�����c���������y�ď��s S �������㷨�M���˸��M������ 4 �μӜp�ٺ��ˡ� 2 �μ���ǰ�M��܉�EҎ���㷨��ͬ�r߀�o�������������W���������ͨ�^������C��ԓ�㷨�Č����ԡ�
�����P�I�~��S ������;�����C����;܉�EҎ��;�Ӝp���㷨
����0 ����
�����߉�ݔ늾�·����������Ļ������ϣ���ݔ늾�·����������Ӱ����ϵ�y�İ�ȫ[1-3]�����ó����C�����M��ݔ늾�·������һ�N�^����֮��Ч�ij�����ʽ�����⌦ݔ늾�·Ѳ���C���˵��о����^��[4]��Ŀǰ�����C���˼��g�^�������Ǽ��ô������ˮ��о�Ժ[5]�������� HQ LineROVer �b��С܇����Ҫ�������ݔ늾�·�ĸ�������ԓ�C���˲��߂�Խ��������ֻ������ɗU��֮�g�ĸ������� ���� 863 Ӌ�����Y���£�Ѳ���C���˵��о�ȡ����һ���ɹ�[6-8]���������C����߀̎�������A�Σ��]�г���ĮaƷ��
���������C���˵Ĺ����h���̓Ȳ��Y�����⣬�����x��������\��܉�E�����y���I�����еļӜp���\�з�ʽ���������ٶ�ͻ׃�Ć��}���O���C���˵Ă���ϵ�y��ɛ_�������صČ�����O�����[9]�������������õ� S �������Ӝp���㷨����Ч�����������}�İl�������ܵõ��^��������\��Ч����Ŀǰ�ܶ��W��ᘌ� S ���������㷨�OӋ�̓����M�����о�����[10-11]���īI[12]�����˸��ټӹ�܉�Eģ�ͣ����� S �������Ӝp�ٿ���ģʽ�£����һ�N���ڕr�g��ĸ��ټӹ�܉�EЧ���u�r���������� S ����������Ӝp���㷨�ںܶ��I���ж������w�F�䃞Խ֮̎���īI[13-15]�� S �������Ӝp���㷨�����ڔ���ϵ�y�У�ȡ���˺ܺõĿ���Ч�������� S ����������Ӝp���㷨�ڙC�����cλ����[16]���V�������C[17]��ֱ��늙C��ϵ�y[18]��Ҳ�õ��ˑ��á�
�������Č��������C�����ڷǸ��������ϵĺ��˺͛_��܉�E�M�з�����ʹ�C���˵��_�����r�_���T�������Ч����ߡ�ͬ�rᘌ������C�����\�Эh��������ʽ�������ԣ���ʹ�����C�����\��ƽ�������Č��\�����Ե� S �������Ӝp��˼�룬��Ч�p�ٛ_�������L�C���˵�ʹ�É�����ʹ�����C��������ݔ늾�·������ȡ���^�õ��\��Ч����
����1 �����C���˵ij���ԭ��
���������C������ݔ늾�·�Ͻ��v���١�ƽ��ǰ�M 2 ����B�����������܉�����Ч��ȥ;�������^��ĸ����r���C�����ٶ��½����������늄әC���D����ɹ��ϣ������ֹͣ����S�������ٛ_�����������_������ij���Ч������ʹ�C�����ٴε��_����λ�Õr�ě_���T������ٴε��_����λ�Õr�ٶȞ����ֵ vmax���Һ���λ�� S1 ��ǰ�Mλ�� S2 ���;����˾�·�����p����r���t���͈��б��^�̣����_����Ч������Ŀ�ġ��C���˳����^�������ٶ�������D 1 ��ʾ���D�� vm��C���˵�����\���ٶ�;vn ��C���˳�Ҏ�\�Еr���ٶ�;vr ����˕r�ķ�������ٶ�;S1 ��C���˺���λ��;S2 ��C����ǰ�Mλ�ƣ����ҝM�� S1+S2=0 ���Pϵ��
�����������C������������ӕr������ָֹͣ���D 2(a)��ʾ;�����C���˰��o���� S �������Ӝp���㷨���к���ָ���D 2(b)��ʾ;�������C���˺�����ָ��λ�ú�ֹͣ����D 2(c)��ʾ;�����C���˰��OӋ�� S �����������㷨����ǰ�Mָ���D 2(d)��ʾ;�������C�����ٴε��_����λ�Õr�ٶ��_�����ֵ����������ٶț_����������D 2(e) ��ʾ��
����2 �����C�����\��܉�EҎ���㷨�OӋ
����2.1 S �������ĺ����\��܉�EҎ��
�����鱣�C�����C�����ڛ_�������^�����܉�ƽ���\�У���Ҫ�����ٶ��M�п��ơ����y���μ��ٷ�ʽ�ļ��ٶ�׃�����B�m�������C����ϵ�y��ɛ_��������ϵ�y���F���[9]�����x�����Զ��^�õ� S �������Ӝp�ٿ��ƿ��Ա�������r�İl�����Ķ���ߙC���˵Ĺ���Ч�ʡ����y�� S �������� 7 �κ������Ɍ��F�Ӝp���^���м��ٶȵ��B�m׃��[19-20]�������y�� 7 �� S �������㷨�����^�࣬Ӌ���������s��Ӱ푙C���˵Ĺ���Ч�ʣ���˱��Č� S �������M����Ҏ�������� 4 �� S �����������㷨����ֵȡ����� S ����������܉�E��D 3 ��ʾ�����ٺ����^�̰������ٶ����Ӻ͜p�ٵļ��ٶΣ��p�ٺ����^�̰������ٶ����Ӻ͜p�ٵĜp�ٶΣ��C������ǰ�\�е��^�̄tֻ���ü��ٶ����Ӻ͜p�ٵļ����^�̣��Ա��C�C���˳����^���܉��\�С��D�� S ��λ��; v ���ٶ�;a ����ٶ�;j ����ٶ�׃���ʡ�
����2.2 S �������Ӝp�ٺ����㷨
�����ڙC�����\���^���У����x��a(t)����ٶ�;v(t) ��C���˵��\���ٶ�;S(t)���\��λ��;�\���^���и��A�εĽKֹ�r�̞� Tk=kT(k=1, 2, 3, 4)�����õ����f�Ʒ��ɵã�
����1)�ڼ��ٶ����ӵļ��ٶΣ��� 0≤t≤T1 �r����
����3 ���漰�Y������
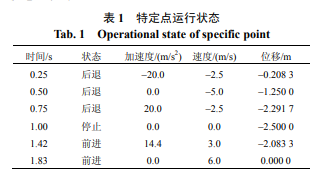
�������������^���е��\��܉�E S �������Ӝp���㷨��������C���˵������\��܉�E���ٶ�ijݔ늾�·�����C���������_��������\���ٶȞ� vmax= 6m/s;�����ٶȞ� amax=20m/s2 ;�xȡ T=0.25s�����ñ�������� S �������Ӝp��܉�EҎ�������㷨�r����ʽ(4)�ɵ� jmax=80 m/s3 ;�� v6(T6)=vmax �� S(T6)=0 �ɵ� p=5/3��jf=34.56m/s3 ��������������������C�����\��܉�EҎ���㷨�пɵ��ض��c�\�Р�B��Ҋ�� 1��
�����������ٶȡ��ٶȺ�λ��܉�E��D 5 ��ʾ�����Ե�֪��
����1)�ں��˺�ǰ�M�^���У��C�����\�еļ��ٶ��B�m׃�������o���ٶ�ͻ׃�F�Ķ�ʹ�ÙC���˵��\���m����늄әC�����ܣ���Ч�p�ٛ_��������C�������\���^���аl����������ӣ��Ķ������L�C���˵�ʹ�É�����
����2)�����C���˵��\���ٶ��B�m���ٶ�׃��ƽ������ͨ�^�\��܉�E���Կ����C���˵�ǰ�M���˼Ӝp���㷨�������õ����ԣ��Kֹ�r���_������ٶ�ֵ vmax��ʹ�ó����C�����ٴε��_����λ�Õr�@�����ě_���T�����_����Ч������Ŀ�ġ�
����3)�������C�����؛_�������ٶ��_�����ֵ vmax �r��λ��ֵ���㣬���C���˄��õ��_������ʼλ�á�
����4 �YՓ
���������x�����Ե� S ��������ݔ늾�·�����C���˵��\��܉�E�M����Ҏ�����������y 7 �� S �������M���˸��M������ 4 �κ��ˡ�2 ��ǰ�M�� S �������Ӝp���㷨������˙C�����\�е�ƽ���ԣ��ڌ��H�����У�ֻҪ�������H��r�m�����{�������ٶȡ�����ٶȼ��\�Еr�g�����ܿ��ٵصõ����܃����� S ���ٶȽo��������——Փ�����ߣ��Ժ� 1 ������� 1 ���읍 1 ����� 2
���������īI
����[1] �w�����������s���w�¿�����.�҇��Ϸ��^늾W�����¹ʷ�����������ʩ�о�[J].������y�OӋ��2009(1)��52-56. Zhao Yongsheng��Wang Furong��Zhao Dekui��et al.Analysis and countermeasures about icing accident power transmission line in South China[J].Electric Power Survey & Design��2009 (1)��52-56(in Chinese).
����[2] ����־.����e������������¹ʵ��{���c����[J].�|��������g��2001��22(12)��15-19. Zhang Hongzhi.Investigation and analysis on the accidents of large-area line conductors ice coating and galloping[J].Northeast Electric Power Technology��2001��22(12)��15-19(in Chinese).
����[3] ������������ƽ�������h.ݔ늾�·������Σ�������o[J].늴ű�������2006(2)��12-14. Li Zhengmin��Yu Zhenping��Hu Yanfeng.Transmission line regulation harm and protection[J].Insulators and Surge Arresters��2006(2)�� 12-14(in Chinese).
����[4] Jun Sawada.A mobile robot for inspection of power transmission lines[J].IEEE Transactions on Power Delivery��1991��6(1)��309-315.
����[5] Montambault S��Cote J��St-Louis M.Preliminary results on the development of a teleported compact trolley for live-line working [C]//Proceedings of the IEEE International Conference on Transmission and Distribution Construction and Live Line Maintenance.Montreal��Canada��IEEE��2000��21-27.
����[6] ���L�࣬�ǐۇ������O��.�߉��ܿ�ݔ늾�·�Ԅ�Ѳ���C���˵�����[J].���ϵ�y�Ԅӻ���2004��28(23)��89-91. Zhou Fengyu��Wu Aiguo��Li Yibin��et al.Development of a mobile robot for inspection of high voltage overhead power transmission lines[J].Automation of Electric Power Systems��2004��28(23)�� 89-91(in Chinese).
����[7] �ǹ�ƽ��Ф�ԕ���Ф�A����.�ܿո߉�ݔ늾�·Ѳ���C���˘әC����[J].���ϵ�y�Ԅӻ���2006��30(13)��90-93. Wu Gongping��Xiao Xiaohui��Xiao Hua��et al.Development of a mobile inspection robot for high voltage power transmission line[J]. Automation of Electric Power Systems��2006��30(13)��90-93(in Chinese).
����[8] ���d�������Kƽ������⣬��.ݔ늾�Ѳ�z�C����Խ�ϙC���cԇ�[J].�Cе���̌W��2009��45(2)��119-125. Zhu Xinglong��Zhou Jiping��Wang Hongguang��et al.Experiments and mechanism of obstacle negotiation of an inspection robot for transmission lines[J].Journal of Mechanical Engineering��2009�� 45(2)��119-125(in Chinese).
����[9] ��Դ����������O��I����.S �����Ӝp�ٿ��Ʒ����о�[J].�Ї�����I��Ϣ����2006��35(23)��38-40. Zhu Xiaochun �� Qu Bo �� Sun Laiye �� et al . Study on the accelaration/decelaration control method for S-curve[J].Manufacture Information Engineering of China��2006��35(23)��38-40(in Chinese).
����[10] ����x���w�x�ܣ����I.S �����Ӝp�ٿ����·������о�[J].�M�ϙC���c�Ԅӻ��ӹ����g��2007(10)��50-53. Li Xiaohui��Wu Yijie��Leng Hongbin.Research on a new S-curve acceleration and deceleration control method[J].Modular Machine Tool & Automatic Manufacturing Technique��2007(10)��50-53(in Chinese).