�l(f��)���r(sh��)�g�����ٷ��늹��QՓ���g�[��1��
ժ Ҫ�� ժҪ�����ڸ߉�ݔ늾�·Ѳ���C(j��)���˵��о����Y(ji��)�ϸ߉�ݔ늾�·�ϸ�����ȥ���������O(sh��)Ӌ(j��)��һ�N���͵ĸ߉�ݔ늾�·�����C(j��)���ˡ����� ADAMSܛ����(du��)ԓ�C(j��)�����M(j��n)�����\(y��n)��(d��ng)�W(xu��)����(d��ng)���W(xu��)���������档�Y(ji��)��������ԓ�C(j��)��������ݔ늾��Ϸ�(w��n)�������ߣ������^�õؽ�Q����Խ�ϵĆ�(w��n)�}�������
����ժҪ�����ڸ߉�ݔ늾�·Ѳ���C(j��)���˵��о����Y(ji��)�ϸ߉�ݔ늾�·�ϸ�����ȥ���������O(sh��)Ӌ(j��)��һ�N���͵ĸ߉�ݔ늾�·�����C(j��)���ˡ����� ADAMSܛ����(du��)ԓ�C(j��)�����M(j��n)�����\(y��n)��(d��ng)�W(xu��)����(d��ng)���W(xu��)���������档�Y(ji��)��������ԓ�C(j��)��������ݔ늾��Ϸ�(w��n)�������ߣ������^�õؽ�Q����Խ�ϵĆ�(w��n)�}�������ݔ늾��ϵij����΄�(w��)��
�����P(gu��n)�I�~���ܿ�ݔ늾�·;�����C(j��)����;Խ��;�\(y��n)��(d��ng)�W(xu��);��(d��ng)���W(xu��);����
���������(l��i)���ڶ��_˹�����ô�����(gu��)���ձ���Ӣ��(gu��)�����m�����u���Ї�(gu��)�ȱ�����(gu��)�ң�����ݔ늾�·�ϵĸ����ͷeѩ������·���l���ྀ�����U���^�����W�j(lu��)��ͨ���Д���¹ʣ�����˾�Ľ�(j��ng)��(j��)�pʧ����ˣ����ư�ȫ��Ч��ݔ늾�·�����C(j��)е�Դ����˹�������(du��)���o(h��)늾W(w��ng)�İ�ȫ�\(y��n)�к͜p���ˆT������������Ҫ�ĬF(xi��n)��(sh��)���x��Ŀǰ����(gu��)��(n��i)�P(gu��n)�ڴ˷�����о��^�٣���Ҫ��ɽ�|����о�Ժ�������P(gu��n)���о��������o(w��)����ĘәC(j��)���F(xi��n)����(gu��)�H���P(gu��n)�C(j��)��(g��u)�m�ڴ˷����M(j��n)����ԇ�(y��n)�о������x��(sh��)�û����кܴ���x���b�ˣ����Ļ��ڸ߉�ݔ늾�·Ѳ���C(j��)���˵��о�[1]������������һ�N��(w��n)���Ժá�����Ч�ʸߵ��p�C(j��)е�۸��ӳ����b���c�A�o�b��ʽ�ij����C(j��)���ˣ�����(du��)�C(j��)�����M(j��n)�����\(y��n)��(d��ng)�W(xu��)����(d��ng)���W(xu��)��������(d��ng)���W(xu��)���棬���(y��n)�C�O(sh��)Ӌ(j��)�ĺ������c�����ԡ�
����1 �ϵK����c�����C(j��)����ģ�ͷ���
����1.1 �ϵK���
������(g��u)�ɼܿ�ݔ늾�·����ҪԪ���У����A(ch��)(�ױP�����P���F(xi��n)�����A(y��)��䓽���������rʯ�����ڡ�������)����(d��o)��(�ܿյؾ����ӵؾW(w��ng))��������늗U(ˮ���U���M��(d��n)�����������P���F��)���^���Ӵ������N��ߵȡ��@ЩԪ���ЙC(j��)�ؽM����һ����γ���һ�l�ܿ�ݔ늾�·�����C(j��)�������I(y��)�r(sh��)����ܿ�Խ�����N���Ҵ�����D(zhu��n)�۾�[2]3�N��͵��ϵK����У������N���b�ڼܿյؾ��ϣ�������ݔ늾�·���L(f��ng)�����®a(ch��n)�������(d��ng)���Ҵ���߷ֆΡ��p�Ҵ���ߣ��ΑҴ�����g�ľ��x�s400mm���p�Ҵ�������Ƀɂ�(g��)�ΑҴ���߽M�ɡ��D(zhu��n)�۾���ݔ늾�·��׃������͏���·��(n��i)[3]��
����1.2 �����C(j��)���˽Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
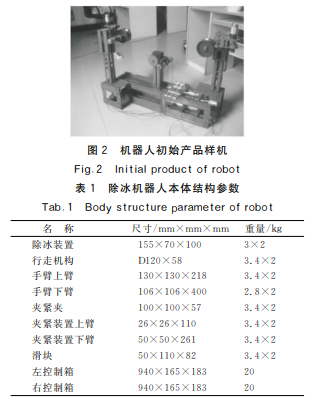
�������ڙC(j��)���˵Ĺ����h(hu��n)����(f��)�s����ˑ�(y��ng)�߂������������ٷ�������;���ϡ����º��Ƅ�(d��ng)����;������Խ������;�ܷ�ˤ������;�ݳ���ѩ��������M�������l���������O(sh��)Ӌ(j��)��һ�N�p�C(j��)е�ۑҒ�L݆�ӊA�o�b�úͳ����b��ʽ�Ƅ�(d��ng)�C(j��)���ˣ�������Ҫ��B�C(j��)���˵�Խ�ϲ��֣���Y(ji��)��(g��u)��(ji��n)�DҊ(ji��n)�D1��
����2 �����C(j��)���˵��\(y��n)��(d��ng)�W(xu��)����
����2.1 ��(sh��)�W(xu��)ģ�͵Ľ���
������C(j��)���˃ɱ��ڿ�Խ�ϵK��r(sh��)�Ą�(d��ng)����(du��)�Q���ʷ����C(j��)���˵��\(y��n)��(d��ng)�W(xu��)�̈́�(d��ng)���W(xu��)�r(sh��)���H��������ֱۣ������xȡ�C(j��)���˵�ǰ���M(j��n)�з���������D-H�����������C(j��)���ˆαۿ�Խ�ϵK��r(sh��)�ėU����(bi��o)ϵ[4]������(sh��)Ҋ(ji��n)��2���U����(bi��o)ϵʾ��DҊ(ji��n)�D3��
����2.2 Խ�τ�(d��ng)��Ҏ(gu��)��
������(d��ng)�C(j��)���������ϵK��r(sh��)�����÷³�����ߵķ�ʽ��Խ�ϵK������b��ʼ�Kλ������݆����ǰ����Խ�ϵĄ�(d��ng)��Ҏ(gu��)���飺��(d��ng)ǰ�������ϵK��r(sh��)��ǰ�ۺͺ�۵�����ͬ�r(sh��)������ֱ�����ֱ��ϵľ��A�A�oݔ늾�;�A�o�b������ǰ�۸����������䎧��(d��ng)���A������ֱ���ɊA�oݔ늾�;ǰ�����䎧��(d��ng)����݆�������b����������ʹ����݆��ȫÓ�xݔ늾������A���_(k��i)ݔ늾���ǰ��형r(sh��)����D(zhu��n)180°;�ҿ����䎧��(d��ng)ǰ������(du��)���������ǰ�Ƅ�(d��ng)��ֱ��ǰ�ۿ�Խ�ϵK�ǰ��형r(sh��)����D(zhu��n) 180°���˕r(sh��)����݆λ��ݔ늾������Ϸ���ǰ�����䎧��(d��ng)����݆�������b���½���ֱ������݆�䵽ݔ늾��ϣ��@��ǰ�ۼ������Խ�����I(y��)���o�������۵�Խ�ϣ��cǰ�۵�Խ�Ϸ�ʽ��(du��)�Q���؏�(f��)������(d��ng)��������(g��)�C(j��)���˱�ɿ�Խ�ϵK�
����3�����C(j��)���˵Ą�(d��ng)���W(xu��)����
����3.1 �o(w��)�ϵK�ε����W(xu��)
����������ݔ늾�·�У����ڼܿ�ݔ늾�·�ęn���^�ܿվ��Ľ���ߴ��ܶ࣬�Ҽܿվ�����ö�ɼ�(x��)���پ���(g��u)�ɵĽg�Ͼ������Լܿվ��Ą��Ԍ�(du��)��Ғ���g�����Π��Ӱ푺�С���ɴ˿ɼ��O(sh��)�Ғ��ڃɻ��U���g�ļܿվ��ʑ�朾��Π
����3.3 ��(d��ng)���W(xu��)����Y(ji��)������
��������(j��)����Խ�τ�(d��ng)����Ҏ(gu��)������(du��)ǰ�۵�Խ�τ�(d��ng)���M(j��n)�Є�(d��ng)���W(xu��)���棬�ɫ@����������(du��)���ʻ�Ť�ز��ֵ��\(y��n)��(d��ng)��r����������(y��ng)�P(gu��n)��(ji��)����Ľ��ٶȡ����ء������c�r(sh��)�g���������քeҊ(ji��n)�D4��5���ɈD�ɿ�������ǰ����Խ�ϵ��^(gu��)���и��P(gu��n)��(ji��)���\(y��n)��(d��ng)�����gЪ�����(d��)�����Ҹ��r(sh��)�g�ε��\(y��n)��(d��ng)�^(gu��)��ʼ ĩ�ٶȾ����㣬���ٵ������ٵ��p�ٵ��^(gu��)��;���_(k��i)ʼ�r(sh��)�������^�������_(k��i)ʼ��һ��(g��)���ٶȼ�����ǰ�������莧��(d��ng)����(g��)�������w�c�A�o�b�������^(gu��)�̣�����ɴ˄�(d��ng)��������׃С����ƽ����ԭ�����ڴ��P(gu��n)��(ji��)���\(y��n)��(d��ng)��ǰ�����䎧��(d��ng)�|(zh��)�������ǰ�۳����b�������\(y��n)��(d��ng)����������^С����;�������w�\(y��n)��(d��ng)�^(gu��)��������ǰ�ۑҿՕr(sh��)�C(j��)���ˮa(ch��n)��һ�������(d��ng)��(d��o)�µõ����ص��\(y��n)��(d��ng)��������Įa(ch��n)������(d��ng);�� ��һ��(g��)���ʲ���(d��ng)�����ķ�ֵ���@����֮��ɂ�(g��)�ķ�ֵ����ԭ���c����׃����ԭ����ͬ��
�������P(gu��n)֪�R(sh��)���]���QՓ�İl(f��)������Ҏ(gu��)�ڿ�����
�����C�Ͽ�֪���ٙC(j��)���ˆα�Խ�ϵĕr(sh��)�g�s��55s���ʙC(j��)�����p�ۿ�Խ�ĕr(sh��)�g�s��110s���ڙC(j��)���˵�Խ�τ�(d��ng)���^���������(q��)��(d��ng)���P(gu��n)��(ji��)�\(y��n)��(d��ng)늙C(j��)�Ĺ��������ʵķ�ֵ�քe�s��7.40��17.28W�����]��늙C(j��)�p������Ӱ푣����O(sh��)Ч�ʞ�0.5���t����늙C(j��)���ʷ�ֵ�քe��20��40 W���ɝM��Ҫ���\(y��n)��(d��ng)�r(sh��)��Ҫ��Ť���^С������x��С��ֱ��늙C(j��)���ɡ�������(g��)�����^(gu��)�̺ܺõط�ӳ��ʽ(5)�����c�\(y��n)��(d��ng)���P(gu��n)ϵ��
����4 �Y(ji��)�Z(y��)
����a.������һ�N���߉�ݔ늾�·�����C(j��)���ˣ������˙C(j��)���˵ĽY(ji��)��(g��u)�������˙C(j��)���˵Ĕ�(sh��)�W(xu��)ģ�ͣ�Ҏ(gu��)���˙C(j��)���ˆα�Խ�ϵĄ�(d��ng)���������˙C(j��)���˵Ą�(d��ng)���W(xu��)���̣��\(y��n)�Ä�(d��ng)���W(xu��)����ܛ�� ADAMS��(du��)�C(j��)���ˆαۿ�Խ�ϵK���M(j��n)���˷��档�Y(ji��)��������ԓ�C(j��)���˵��O(sh��)Ӌ(j��)���������С�
����b.�C(j��)����Խ�ϕr(sh��)�ķ�(w��n)���Ԍ�(du��)�C(j��)����Խ���|(zh��)��Ӱ��^��(y��ng)�M���p�ٙC(j��)����Խ�ϕr(sh��)�����(d��ng)��——Փ�����ߣ��� ��1���� ��1�������1���uʥ��(qu��n)2��������2�����U(xi��n)��3
���������īI(xi��n)��
����[1] ���\(y��n)�������ԝɣ��T��.�ܿ������·Ѳ���C(j��)���˵��о��C��[J].�C(j��)���ˣ�2004��26(5)��467-473.
����[2] �����.���ݔ늾�·Ѳ���C(j��)���˙C(j��)е���w�Y(ji��)��(g��u)���о�[D].���u��ɽ�|�Ƽ���W(xu��)��2005.
����[3] ������.������̸߉���늾�·�O(sh��)Ӌ(j��)�փ�(c��)[M].�������Ї�(gu��)��������磬2003.
����[4] ��.�C(j��)���˄�(d��ng)���W(xu��)�c����[M].�������ߵȽ��������磬2005.
����[5] ���������ׂ�.�ܿ�ݔ늾�·�O(sh��)Ӌ(j��)[M].�������Ї�(gu��)��������磬2007.
����[6] �����@.�������փ�(c��)(��2��)[M].�������Ї�(gu��)��������磬2001.
����[7] �O��(sh��)��.���I(y��)�C(j��)���˼��g(sh��)���A(ch��)[M].�������������I(y��)��W(xu��)�����磬2006.