�l(f��)���r�g�����ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ: � �� 220KV �߉�ݔ늾������C�����@һ�µęC���ˑ�(y��ng)���I(l��ng)��, �����һ�יC�����\�ӿ���ϵ�y(t��ng)�� �� �� �� �F(xi��n) �� һ �N �����_��ʽ�\�ӿ���ϵ�y(t��ng),ԓϵ�y(t��ng)�ɹ��ؙC���\�ӿ��ƿ��M��,ͨ�^�o��ͨӍ���Ƴ����C���˵�����Խ�τ���,�� �� Խ �� ���N���Ҵ����A�ȡ� ��ϵ�y(t��ng)
����ժҪ: � �� 220KV �߉�ݔ늾������C�����@һ�µęC���ˑ�(y��ng)���I(l��ng)��, �����һ�יC�����\�ӿ���ϵ�y(t��ng)�� �� �� �� �F(xi��n) �� һ �N �����_��ʽ�\�ӿ���ϵ�y(t��ng),ԓϵ�y(t��ng)�ɹ��ؙC���\�ӿ��ƿ��M��,ͨ�^�o��ͨӍ���Ƴ����C���˵�����Խ�τ���,�� �� Խ �� ���N���Ҵ����A�ȡ� ��ϵ�y(t��ng)��Ӳ����ܛ�����F(xi��n)�ɂ�����քe��B�����\�ӿ��ƵČ��F(xi��n)�^��,���Y(ji��)������ԓϵ�y(t��ng)�����^�ߵĿ� �� �ԡ����r�Լ����õ��˙C�����ԡ�
�����P(gu��n)�I�~: �����C����; �߉�ݔ늾�; �\�ӿ���
����1 ����
�����҇���ݔ늾�·���������صć���֮һ, ��·�����¹ʰl(f��)���ĸ��ʾ�����ǰ��,2008 ����҇��Ϸ�����ѩ���������ǽo����O(sh��)ʩ������y�Ե��Ɖ�, ��(sh��)�����������ݔ늾�·�����^���Љ��Ҡ��������,�о�һ�N�߶��Ԅӻ��ij����C���˴����˹� ���� �� �� ���o �� �� 늾W(w��ng) �� �� ȫ�\ �� �� ��� �� �� ���� ����ȫ���ИO�����еĬF(xi��n)�����x��
����Ŀǰ�����C�����ѽ�(j��ng)�ɞ�C�����о��I(l��ng)���һ��� �c,�īI�Y(ji��)��ݔ� �� · �ϸ� �� �� ȥ�� �� �� �O(sh��)Ӌ �� һ �N�� �� ʽ ���� �C����; �īI�����һ�N�µ�ݔ늾�·�����C����Խ�Ϸ����������M�����\�ӌW�̈́����W����; �����C�������ڐ��ӭh(hu��n)���Ќ�ݔ늾�·�M�Пo�p�������I(y��),��Y(ji��)��(g��u)�����ܡ�������ͨ�ŵȷ��涼�������Ҫ��,����б�Ҫ�������C���˵ı��w�������b�á�ϵ�y(t��ng)�����O(sh��)Ӌ,ܛӲ�����F(xi��n)�ȸ����������������о���
��������������C���˵�һ����Ҫ����, �\�ӿ���ϵ�y(t��ng)���܌�ֱ�� Ӱ 푳� �� �C ���� �� �� ���� �� �� �ٿ� �ԡ� �� ��� �� 220KV ݔ늾�·�ĽY(ji��)��(g��u)���c,���ճ����C���ˌ��H������Ҫ��,�O(sh��)Ӌ��һ�N�Y(ji��)��(g��u)�������� �η� ������ չ�� �� �� ��ݔ � �� ���� �C �� ���\�ӿ���ϵ�y(t��ng)��
����2 �����C���˽Y(ji��)��(g��u)
����Ŀǰ,�����O(sh��)Ӌ�ij����C���˲��õ������۽Y(ji��)��(g��u)�����ı��w��Ҫ�������Cе�ۡ��쾀�b�ü������b�á����wœ�ȽM��,��Y(ji��)��(g��u)��D 1 ��ʾ��
�����������Cе����:���g�Cе�۵����P(gu��n)��(ji��)����s,���ϰ��b�����(q��)��݆,��Ҫ�Á��(q��)�әC���˵����M�ͱ��֙C����ƽ��;�ɂ�(c��)�Cе�۵��P(gu��n)��(ji��)�������D(zhu��n)�P(gu��n)��(ji��),ÿ����ĩ�˰��bһ���쾀�b��,�쾀�b������В쾀݆�ͳ����b��,��Ҫ������ɳ��������͊A����|��
�������P(gu��n)֪�R���]���Ԅӻ��C�����Փ�İl(f��)��ָ��
�������wœ�t���Ʉ����䡢�������늳����������ֽM�ɡ� �����C���˲��û�τ�����ʽ���, �C�ϴ��d��һ�_���Ͱl(f��)늙C��һ�K������늳�, �����������^�քe�����ڱ��wœ�ăɶˡ��������dz����C���˿���ϵ�y(t��ng)�ĺ���,���ؙC�ͱ��������O(sh��)�䶼�����������С�
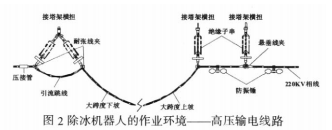
����3 �����C���˵����I(y��)�h(hu��n)��������Ŀ��
���������O(sh��)Ӌ�ij����C������Ҫ���� 220KV �߉�ݔ � �� ·�ij������I(y��)�� 220KV �߉�ݔ늾�·��һ�N�����^���ϵK���s�Ĺ����h(hu��n)��, ����;�·���ϵK��r��D 2 ��ʾ, ����Ҫ����:ֱ��������ݔ늾���(��)�¡��^���ӡ��� �� �N�����N �� �A������ �����ȡ� �����C�����\�ӿ���ϵ�y(t��ng)����Ҫ����Ŀ�˿��Ը����������傀����:(1)���C�����C���������Լܿվ��ϵ�ƽ��(w��n)����,���������¡��Ƅӡ�������ؓ�d�ȸ�����Ć��};(2)��Խ�^���ӡ������N�����N���A(�Ҵ����A���͏��� �A ��)������ �ܡ��� �������� ����;(3) ���ϙC�����ˑB(t��i)ƽ��(w��n)�Լ��������������;������ٲ����İ�ȫ���x;(4)���ϳ����b�õ�ƽ��(w��n)�\��;(5)���C�����C���˼�������b���ڱ�����ѩ���l���������\�С�
����4 ����ϵ�y(t��ng)�����O(sh��)Ӌ
���������C������һ�����s���Ԅӻ��O(sh��)��, ���(q��)��Ԫ����(sh��)������,�������Ĵ���� 20 ��늙C,������늙C 2 �����(q��)�Ӽ��P(gu��n)��(ji��)늙C 8 ���������C�����{(di��o)��(ji��)늙C 7 �����x܇늙C 3 ���� �ҳ����C���˹���������ݔ늾�·��,�\�Ӡ�B(t��i)���^���s,���⾀·�ϴ��ںܶ��ϵK�ﲢ�Ƕ��ǵ��ͽY(ji��)��(g��u), ���ҙC����Ҫ�L���ڐ��ӭh(hu��n)���¹���,���ܕ����F(xi��n)�S���A�벻������r�� ���@�N��r��,���˱��C�C���˹����ķ�(w��n)���ԺͰ�ȫ��, ���\�ӿ���ϵ�y(t��ng)����Ҫ�߂䌦��늙C�ķ�(w��n)����������,����Ҳ��(y��ng)ԓ�߂��ײ����ԡ����,��D 3 ��ʾ,�����C���˵��\�ӿ���ϵ�y(t��ng)�֞�ɂ�����,���h�̱O(ji��n)�ض˺͙C���˱��w���ƶˡ� ����֮�gͨ�^�o����ʽ���F(xi��n)�p��(sh��)��(j��)��ݔ: һ�������O(ji��n)���ˆT���Խ��Ձ��ԙC���˵�ҕ�l�D��̽�y��������(sh��)��(j��)���C����λ�ˠ�B(t��i)��ݔ늾�·������Ⱥ��������Ϣ;��һ����,����O(ji��n)���ˆT���Ԍ��C���˰l(f��)�����N��������,ָ���C���˹�����
�����b��������ָ��֞��΄�(w��)��ָ����P(gu��n)��(ji��)��ָ��ɷN: �����΄�(w��)������ֱ�ӽo�C�������_�����΄�(w��),���緭Խ���N���A,�������N��,�C���˸���(j��)���Ⱦ��̵��\���^���M���\��,����΄�(w��);�P(gu��n)��(ji��)��������ֱָ�ӌ��C���˵ĸ����P(gu��n)��(ji��)���܆�Ԫ�M�п��ơ�
����5 ����ϵ�y(t��ng)Ӳ���Y(ji��)��(g��u)
��������ϵ�y(t��ng)���wӲ���Y(ji��)��(g��u)��D 4 ��ʾ
��������(j��)�ּ��f�A��˼��, ��Ӳ��ϵ�y(t��ng)���O(sh��)Ӌ�ϲ��������ӽY(ji��)��(g��u),���h�̱O(ji��n)�،ӡ��C�d���ƌ��Լ���(zh��)�Ќӡ� �h�̱O(ji��n)�،�λ�ڵ���O(ji��n)��Ӌ��C, ��Ҫؓ؟�^�y�C���˵Ĺ�����r�������M���b����;�C�d��Ϣ�����c�Q�ߌӺ͈�(zh��)�Ќ�λ�ڙC���˱��w��,��Ҫؓ؟ �F(xi��n)�� �� �� ��Ϣ �� �� �r�� ���� �� �N�� �� �� ���� �� �w �� �F(xi��n) ���� ���\ �� �� �ơ� �� �� �C �d�� Ϣ �� ���c �Q �� �ӵ� �� �� �əC �d ���ؙC���F(xi��n),��(zh��)�ЌӵĹ�����Ƕ��ʽ�\�ӿ��ƿ����F(xi��n)�� �ŷ�늙C�M�����(q��)�ӡ��P(gu��n)��(ji��)늙C���x܇늙C,�_�P(gu��n)늙C�M��������늙C������늙C�������{(di��o)��(ji��)늙C��
�������� �O(ji��n) ��Ӌ �� �C �͙C �� �� �C�d �� �� �C֮ �g �� �� �o �� �� ��W(w��ng) ͨ Ӎ ��ʽ �M �� ���� �� Ϣ �Ϳ� �� ָ ��� �� ݔ�� �C�� �� �C �d���� �C ���\ �� �� �ƿ� �� �� ���� �F(xi��n) �� ���� �� �� ��ʽ �� �� �Y(ji��)��(g��u)�� �\�� �� �� �� �� �� �� �� DSP �� FPGA �M ��, �� �c �C �d �� �� �C һ ͬ��(g��u) �� �� һ �� �_ �� ʽ �\ �� �� �� ϵ �y(t��ng),��“PC+�\ �� �� �� ��”ģ ʽ���@�Ӿ͌� PC �C����Ϣ̎���������_ �� ʽ ���� �c �c �\�� �� �� ���� �\ �� ܉ �E �� �� �� �� �� �C �� �Y(ji��) �� �� һ ��, �� �� �� Ϣ ̎ �� �� �������_�ų̶ȸ��\��܉�E���Ɯʴ_��ͨ���Ժõ����c��
����6 ����ϵ�y(t��ng)ܛ��
���������C�����\�ӿ���ϵ�y(t��ng)�h�̿��ƶ���D 5 �� ʾ,ԓ ϵ �y(t��ng)���� VC++.NET ƽ�_����,��(y��ng)�öྀ �� �C �ƿ� �� ͬ �r�� �� �� 늙C�M�Ќ��r����,���Ҿ߂���P(gu��n)��(ji��)�����΄�(w��)������������
������D 5 ��ʾ,ԓϵ�y(t��ng)����(j��)늙C������c������ ��(w��) �ֹ� �O(sh��) Ӌ����N�P(gu��n)��(ji��)��ָ�����ģ�K,���(q��)��늙C���ơ��P(gu��n)��(ji��)늙C���ơ�ǰ������늙C���б�����늙C���������늙C��
�������� �� ���� �C �� ���� �� �^ ���� Ҫ ʹ ���� �� �(q��) �� � �C �� ���(q��)��,����Խ���^���Єt������(j��)���w��r�x�����Ѓɂ��(q��)��늙C�M�ρ��(q��)�әC��������,������(q��)��늙Cģ�K�����ˏ��x��ʽ�팍�F(xi��n)늙C�\�ӽM��,���ҿ���ͨ�^�\�ӷ�����x����x������C���˵��\�з���,�(q��)��늙C���\�Ѕ���(sh��)�t����ͨ�^�䅢��(sh��) �O(sh��) ���� �ɡ� �� ���C �� �� �P(gu��n)��(ji��) � �C ���� һ �� ���� Խ �� �^ ���� ʹ ��,�� �@ �� ģ �K �� �P(gu��n) ��(ji��) � �C �� �� �� �� � �C �� �� ģ ʽ,ͨ �^늙C�x������x����Ҫ���Ƶ��P(gu��n)��(ji��),ͬ�r���\�ӷ������ͨ�^�P(gu��n)��(ji��)늙C�\�ӷ���_���� ����,���˜p�ٲ������y��,����ϵ�y(t��ng)�O(sh��)Ӌ�бM���p�ٰ��o�Ĕ�(sh��)��,�����C���˵�����늙C�����в��Æ����o������늙C�Ć�ͣ,���o�˺���ʾ���\����ʽ��
����ͬ�r,ԓ����ϵ�y(t��ng)߀���ڳ����C���˵�һЩ�� ���M �� �� �΄�(w��) �� ָ ��Ҏ(gu��) ��,�� ���� �C �� �� ǰ ������ �ˡ��� Խ �� �� �N���� Խ �Ҵ����A��
����7 �Y(ji��)���Z
�����������O(sh��)Ӌ�ij����C�����\�ӿ���ϵ�y(t��ng)�܉�?q��)������늙C�M�з�(w��n)���Č��r����,�C�����ڌ�����\���`��ɿ�,���O(sh��)Ӌ�� �_�� ʽ �\ �ӿ� �� ϵ �y(t��ng)�� �� �� �õ� �� �� �_�� �� �� ���� �� �� ��չ�ԡ���һ������ɳ����C���˵Ă���ϵ�y(t��ng),ʹ��߂�h(hu��n)�������Ҹ�֪����,�����������ṩ���A(ch��)��——Փ�����ߣ��� �O �� �����
���������īI
����[1]����, ����, �ߺ�����. �߉�ݔ늾�·�����C���˵ęC��(g��u)�O(sh��)Ӌ [J]. ���{��W�W��(��Ȼ�ƌW��), 2008, 30(6): 69 - 72.
����[2] ������, ����, �R��w, ����ƽ. ݔ늾�·�����C���˙C��(g��u)�O(sh��)Ӌ�c�����W����[J]. �Cе�c���, 2009, (10): 52 - 55.
����[3]�Ϻ��������˾. 220KV �����ϵ��;�·�U���b�ÈD[M]. ����: �Ї����������, 2005.
����[4]�O��, �లƼ. VC++����Ԕ��[M]. ����: ��ӹ��I(y��)������, 2006.
����[5]����, ��T. ���O��������/�b�ؙC���˿���ϵ�y(t��ng)�O(sh��)Ӌ[J]. Ӌ��C��Ϣ, 2009, 3-2: 253-255.