�l���r�g�����ٷ���Ƽ�Փ���g�[��1��
ժ Ҫ�� ժҪ :�ڷ����߉�ݔ늾�·Ѳ�z���������c�͇�����߉�ݔ늾�·Ѳ���C���˵İlչ�F��Ͱlչڅ�ݵĻ��A��, �Y�ϸ߉�ݔ늾�·�ϸ�����ȥ������, ��Ҫ��B���OӋ��һ�N���͵ĸ߉�ݔ늾�·�����C����.ԓ�C���˽Y������, ������ݔ늾��Ϸ���������, �܉��^�õؽ�Q����Խ�ϵ�
����ժҪ :�ڷ����߉�ݔ늾�·Ѳ�z���������c�͇�����߉�ݔ늾�·Ѳ���C���˵İlչ�F��Ͱlչڅ�ݵĻ��A��, �Y�ϸ߉�ݔ늾�·�ϸ�����ȥ������, ��Ҫ��B���OӋ��һ�N���͵ĸ߉�ݔ늾�·�����C����.ԓ�C���˽Y������, ������ݔ늾��Ϸ���������, �܉��^�õؽ�Q����Խ�ϵĆ��}, ���ݔ늾��ϵij����΄�, ���ЏV���đ���ǰ��.
�����P�I�~:�����C����; ݔ늾�· ; Խ��; ����
�����S���҇������ĸ��ٰlչ, ���߉�������ݔ늾�·Խ��Խ��, ��·���ȴ�Խ�ĵ����h�����ӏ��s, �罛�^����e��ˮ�졢�����ͳ�ɽ���X, �o��·�S�o�����ܶ����y .�����ڇ�������������, �҇����F��ԭ�����һ�����ɺ��^�����F�Fڡ����ڡ�F��, ��ɼܿ�ݔ늾�·����, ʹ��·��� ���W�j ������, �����ྀ���U, ʹ늾W�Y����Ɖ�, ��ȫ�\���ܵ��������{. �ھo����r��, �����T�Î�늲����U��������ƵĽ^����ֻ�ܞ���ٵ�һ���ָ�����·����, �˹������кܸߵ�Σ�U�� [ 1] .
�����ڇ���, һЩ���ҵĵ����c�����r�c�҇�����, ����һЩ���ҵ���r���Ӑ���, ���˱��C���ϵ�y�Ŀɿ���, ��߸߉�ݔ늾�������Ч��, �p�ٓpʧ, �S�o���˵İ�ȫ, �_�lһ�N�����������������M�г������I�������O��һֱ�LJ��������P�о��ğ��c .���, ���ư�ȫ��Ч�ij����Cе�Դ������M�Ќ������������^�õđ���ǰ���͌������x .��������ij����C���˼���һ�N�Ȱ�ȫ����Ч�ij����b�� .
����1 �߉�ݔ늾�·�����C���˵ęC����B
�����C������һ�����s�ęC�һ�w��ϵ�y, �漰���Cе�Y�����Ԅӿ��� ��ͨ�� ����������Ϣ�ںϡ��Դ���g�ȶ����I��.���Cе�Y��������ϵ�y�Ļ��A, Ҳ��Ŀǰ�Ƽs�C���ˌ��û�������ϵK .ᘌ��@�N��r�OӋ��һ�N���͵Č��õĸ߉�ݔ늾�·�����C����, ����������һЩ����:( 1) ����ݔ늾������A����ٶ��M��ƽ������;( 2) ����һ������������;( 3) �܉��Խݔ늾��ϵķ����N, ���A, �^���ӵ��ϵK��;( 4) �܉��ȥݔ늾��ϵı�ѩ.
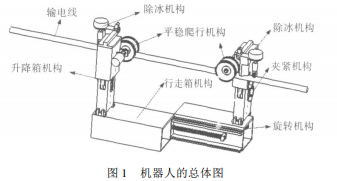
�����C���˵ą�������:�C���˵��w�e�� 600 mm × 328 mm ×526 mm( �L ×�� ×��) ;�����s�� 15 kg ;ƽ�����е��ٶȼs�� 375 m/h .�C���˵ęCе�Y����Ҫ����ƽ�����ЙC����Խ�ϙC���ͳ����C��, �係�w�D��D 1 ��ʾ.
����1 .1 ƽ�����ЙC�����OӋ
��������ʹ�C���˵�ǰ���ٶ��_�����, ��ǰ��ƽ��, �˙C���˲�������݆ʽ�C��, ��D 1 �е�ƽ�����ЙC��.
����1 .2 Խ�ϙC�����OӋ
�����C���˵�Խ�ϙC����Ҫ��������C����������C�����A�o�C�������D�C���M�� .
����( 1) ������C��.�C����������C�����߷�ʽ�Ę�˼�������x�����߷�ʽ .����Ҫ������������C���Լ������ݗU����ĸ�M��, ��D 2 ��ʾ.
����( 2) ������C�� [ 2] .�C���˵�������ʽҲ�����ݗU�әC�������ķ�ʽ.������C������Ҫ�M�ɞ�����C��������C���Լ������ݗU����ĸ�M��, ��D 3 ��ʾ .
����( 3) �A�o�C��[ 3] .�A�o�C���ĊA�o�A�D��D 4 ��ʾ, 1 �黬��, �����C�������ϵ�����S�������л���, 2 ���S��, ����������C��������S����д���, ���S�㎧�ӊA�o�A������������C���IJ������»���, �Ķ����ӊA�o�A� ����r����D, 3 ���A�β�, ���A�o�A���_���cλ�Õr, ��A�o���� .�A�o�A�������NJA�o����, ���\�ӷ�ʽ�ĺ��D��D 6 �͈D 7 ��ʾ.�A�o�A�����_��B��D 5 ��ʾ, �A�o�A�ĊA�o��B��D 6 ��ʾ .�A�o�A�������A�o, ��ɱ��C�C������Խ�ϕr�����l��������S��ȷ�.
����( 4) ���D�C�� .���D�C�����õ���һ���X݆�Ă���, �X݆���b��������C�����������, ��D 7 ��ʾ. 1 ����X݆, ���I�B�ӵķ�ʽ�c 2 ���B, 2 �������c�����C�����B��, ���������nj������C���������B��, 3 ��С�X݆, ������늙C 4 ��, 4 ��С�X݆����늙C, 5 ����ĸ, 6 ����N, 5 �� 6 ����������ס������.��С�X݆���D�r, ���Ӵ��X݆�����D, �����X݆�tͨ�^ 2 ����������C���c�����C�������D .
����1 .3 �����C�����OӋ
����Ŀǰ�������ѽ��о����S��N�����ķ���[ 4] , �������S����Ŀǰ��ֻ�����, ���]�Ќ��F.���OӋ�ĸ߉�ݔ늾�·�����C�������ڌ�Ѳ���C�������OӋ�Ļ��A�����ӳ����b��, �ȿ���Ѳ��Ҳ���Գ���, �Y�����^����, ����Ч�ʱ��^��.���OӋ�ij����C���֞�ɂ�����, ��㊵������cШ�ΉK���� .������㊵� 1 �ĸ��������g㊳�һ�l�ѿp, �������������ֱ�����_, ����Ш�ΉK 4 �ٌ������M�ДD��, ����������D����, �����ij�������� .��D 8 ��ʾ.
�����C���˿�Խ�Ҵ��^���ӵ��ϵK��rһֻ�ֱۑҿ�, ��һֻ�ֱ�Խ�^�^����, ���˕r�ϵK����һ�Ȍ����ϵĸ���δ���, ݆�Ӻ�㊵�̎��һ��ƽ������, �@�Ӿ͕����݆�ӟo����늾������_����r.�����@�N��r�Ŀ��], ����˵� 2 �׳������� .���wʾ��D��D 9 ��ʾ, ���� 2 ��㊵�, ����㊵����ľ��͌������ľ���ֱ, �ڟo�ϵK��r������ij����b�����, ㊵�늙C��㊵����D�������ɂ���ĸ���, �����Ш�ΉK�ڙC����ǰ���ߵ����������¿�������㊵�δ����ĸ���.�������Ҵ����A�@�ӵ��ϵK��r, ����߀������늙Cͣ�C, Ȼ�����ݗU�\�ӵ�늙C, ʹ늘O���D, ���ݗU�D�������c��ĸ���B��Ш�ΉK�Լ�ǰ���㊵�һ����ǰ���M, ֱ����ͨ�^�Ҵ����A���Ҍ����Aǰ��ĸ�������, ֱ����һֻ�ֱ�Խ�Ϻ�݆�ӿ����䵽���������ֹ .������ԓ�θ�����, �ݗU늙C���D����ǰ�M���b���ջ�, Ȼ�����M����������Խ�τ���.
����2 �߉�ݔ늾�·�����C���˵��\���^��
�����˙C���˲����p�۽Y��, �@�ӿ��ԝM���������ߕr�ķ�����, �������p�۵�����¿�������������ˑB�{������ɸ��N�ϵK�Ŀ�Խ�ͳ���[ 5] .�C���˵����w�C�������S�D��D 10 ��ʾ, ���ڴ˙C���˵��ӿ�����늙C����, ��˔������\���^�̌���늙C�龀·�����w�C�����\���^�����U��
��������ʹ�\���^�̷�����������, ���挢���ÙC���˵ĽY�����D������, �C���˵ĽY�����D��D 11 ��ʾ.���ڃ�߅�C���������Q, �����溆�Dֻ��һ߅�����\�ӷ�ʽ�Ę�ע .
��������Ҫ��ɻ����������\�� ���������ϵK��Խ�ͳ���, ��ô�C���ˌ�Ҫ�����»������\����ʽ�����������ɻ����������\�ӡ��������ϵK��Խ�ͳ���. ( 1) �����\�� .�p������ 8 �� 9 ǰ������݆, ������ݔ�������, ����ɳ������΄� .( 2) ���D�\�� .������C���ͳ����C�������w���D�������� 3 �� 14 ���Ե��X݆�M���D�����.�ڴ˙C������, ֻ��Ҫ���D 180° ���� .( 3) �����\��.�C���˵������������� 4 �� 13 �и��Ե��ݗU����ĸ�������\�Ӂ���� .( 4) �A�o�\��.�A�o�\�Ӳ���Ҫ늙C���Ӂ����, �����ѽ�B�^�� 4 �� 13 �����C���M�������\�ӕr�����ӊA�o�A�A�o�����_ݔ늾� .( 5) �����\�� .�������C�����õ��LjD 9 �ij����C���r, ㊵�������c�s���\����Ҫ���� 7 �� 10 ���ݗU�c��ĸ�������\�Ӂ���� .
����������ݔ늾��ϴ��ڶ�N�ϵK��, ��ֻ������һ�N���͵��ϵK������N����Խ��ʾ, ���w���E����.
������ 1 ��:��ǰ�۽ӽ������N�r, 늙C 1, 2 ֹͣ, ����݆ 8 �� 9 ֹͣǰ�M, 늙C 5 �� 6 ���_, ǰ��۵������ݗU형r����D, ���������������������һ������, �A�o�A 5 형r����D�͊A�o�A 12 ��r����D, ���z�A�o�A�A�oݔ늾��r, 늙C 5 �� 6 �P�].���õ� 2 �׳����C��, ���_�����C������늙C, ͨ�^����������Ϳs�ص��^����, �������N��ݔ늾��ϵ�һ�α���ȥ, �Ա�ǰ�۵�����݆ 8 ���� .��D 12 ��ʾ.
������ 2 ��:ǰ�۵�늙C 5 ���_, ǰ�۵������ݗU형r����D, ���ں�۵ĊA�o�A 12 �ь�ݔ늾��A�o, ǰ���й̶��������е���ĸ�����\��, ��ĸ��������ͳ����C��������݆�����\��, �˕r�A�o�A 5 형r����D, ���A�o�A�A�oݔ늾��r, �˕r��늙C 5 �P�] .���_ǰ�����D�C����С�X݆��늙C 7, С�X݆���Ӵ��X݆���D, �����X݆��r����D 180°��, �P�]늙C 7 .���_�����������ݗU����늙C 9, ���ں�۵ĊA�o�A 12 ��ݔ늾��A�o, ��ǰ�۱��������ݗU����ĸ�������Ƅ���ǰ�M, ���Ƅӵ������N�IJ��h̎, �P�]늙C 9 .��D 13 ��ʾ.
������ 3 �� :���_ǰ�����D�C��С�X݆��늙C 7, С�X݆���Ӵ��X݆���D, �����X݆형r����D 180° ��, �P�]늙C 7 .ǰ�۵�늙C 5 ���_, ǰ�۵������ݗU��r����D, ������ͳ����C���½�, ���A�o�A 5 ��ݔ늾��A�o�r, �P�]늙C 5, �˕rǰ�۱��S�^�����N. ��D 14 ��ʾ.
������ 4 ��:�����ͬǰ���^�����Nһ�ӿ�Խ, �C���˱�֏͵���Խ�����Nǰ����r .��D 15 ��ʾ.
����3 �Y Փ
��������������߉�ݔ늾�·�����C���˙Cе���ֵ��OӋ, ԓ�C���˞��ڸ߉������Ԅ����ܻ������I�ṩ��һ�����õ�ƽ�_, ͬ�rԓ�C������δ�Y���������Ԍ�ǰ��ij����b��ж�����Q��Ѳ���b��, �@�Ӿ�׃����Ѳ���C����, �_��һ�C���õ�Ŀ�� .ԓ�C���˲��Ã��ֱ�݆ʽ���߽Y��, ʹ�Y���ϸ��麆��, �����ϸ������F, ����ľ��A�b�úͷ³��Խ�����ߵķ�ʽʹ��ԓ�C���˵ĵĿɿ��Ը���.ͨ�^���挍����, ԓ�C���˿����ھ�·�Ϸ����ij���, ͬ�r��ȫ��Q��ֱ���ε�����Խ�φ��}, ׃·������Խ��߀��Ҫ�˹��o��, �������܉��^�õ����Ҏ���ij����΄�.——Փ�����ߣ� �� �� �� �� �ߺ��� �_ �� �� �D
���������īI :
����[ 1] ���\��, ���ԝ�, �T ��.�ܿ������·Ѳ���C���˵��о��C��[ J] .�C����, 2004, 26( 5) :467-473 .
����[ 2] �ǿ��w, ������, ����Ԫ, ��.�߉����z�y�C���˵���ʽԽ�ϙC��������[ J] .�C���˼��g, 2006( 11) :35-36.
����[ 3] ���d��, �����, ������, ��.һ�N����Խ��Ѳ�z�C�������ߊA�֙C��[ J] .�Cе�OӋ, 2006, 23( 8) :11-13 .
����[ 4] Է����, �Y�d��, �� �x, ��.ݔ늾�·���������ć������о��F��[ J] .��늉����g, 2004, 30( 1) :6-9.
����[ 5] �� ��, ���ӝ�.Ѳ���C���˵����з����OӋ[ J] .�C���˼��g�c����, 2002( 4) :19-21.